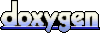
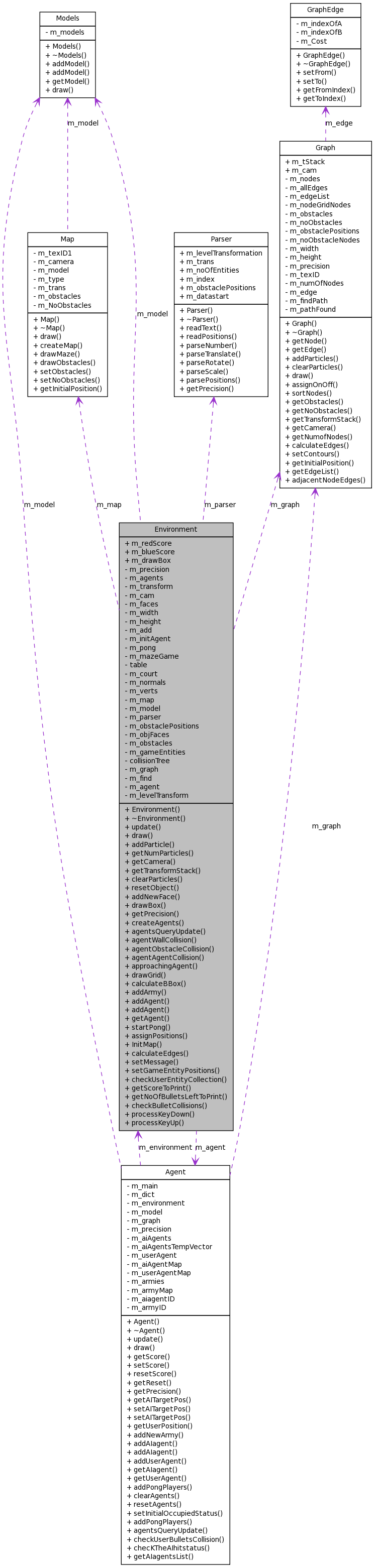
Environment Class Reference
the variables and methods that a Environment contains put in this file More...
#include <Environment.h>
Public Member Functions | |
| Environment (ngl::TransformStack *_t, ngl::Camera *_cam) | |
| ctor | |
| ~Environment () | |
| will explicitly call the Particle dtors as they are stored as pointers | |
| void | update () |
| update all the particles stored, if the particle died, delete it | |
| void | draw () |
| draw all the particles using the particle draw method | |
| void | addParticle () |
| add a new particle to the end of the list | |
| unsigned int | getNumParticles () const |
| accessor for the number of particles stored in the class | |
| const ngl::Camera * | getCamera () |
| get the global camera | |
| ngl::TransformStack * | getTransformStack () const |
| get the global transform stack | |
| void | clearParticles () |
| a method to clear all particles | |
| void | resetObject () |
| a method to reset the environment | |
| void | addNewFace (ngl::Vec3 _point, ngl::Vec3 _normal, face *_face) |
| add a new face | |
| void | drawBox () |
| method to toggle the drawing the bounding box | |
| int | getPrecision () |
| get the precision | |
| void | createAgents () |
| method to create the agents | |
| void | agentsQueryUpdate (AIagent *_agent) |
| method to invoke the query from the agents | |
| void | agentWallCollision (AIagent *_agent) |
| method to check the wall collision | |
| void | agentObstacleCollision (AIagent *_agent) |
| method to check the obstacle collision | |
| void | agentAgentCollision () |
| method to check the agent agent collision | |
| void | approachingAgent (AIagent *_agent) |
| method to check the approaching agent | |
| void | drawGrid () |
| method to draw the grid | |
| void | calculateBBox (std::string _name) |
| method to calculate the faces of the bounding Box | |
| void | addArmy (PyObject *_main, PyObject *_dict) |
| create a new Army with a set of artificial agents | |
| void | addAgent (std::string _file, PyObject *_main, PyObject *_dict, int _index, std::string _meshName, float _radius, std::string _type, int _id) |
| add a new AI agent | |
| void | addAgent (int _index, std::string _meshName, std::string _name) |
| add a new User agent | |
| AIagent * | getAgent (int _id) |
| method to get the agent based on ID | |
| void | startPong () |
| method to start pong game | |
| void | assignPositions () |
| method to assign the positions of obstacles to keep a track of the obstacles | |
| void | InitMap () |
| method to Initialize the map of the environment | |
| void | calculateEdges () |
| method to calculate the edges for the nodes and set the contours around the nodes for better obstacle avoidance | |
| void | setMessage (const std::string _message) |
| method to send messages to the AI agents | |
| void | setGameEntityPositions () |
| method to set the Initial game entity positions like the gold coins and bullets | |
| void | checkUserEntityCollection () |
| method to check the user agent with the game entities | |
| int | getScoreToPrint () |
| method to get the score to print | |
| int | getNoOfBulletsLeftToPrint () |
| method to get the no of bullets of the user agent left | |
| void | checkBulletCollisions (std::list< Ammo * > _bullets) |
| method to check the bullet collision with the obstacle or the agents | |
| void | processKeyDown (QKeyEvent *_event) |
| processKeyDown passed from the main window class | |
| void | processKeyUp (QKeyEvent *_event) |
| processKeyUp passed from the main window class | |
Public Attributes | |
| float | m_redScore |
| float | m_blueScore |
| bool | m_drawBox |
| the bool to toggle drawBox | |
Private Attributes | |
| float | m_precision |
| a variable to store the precision value | |
| std::list< Agent * > | m_agents |
| a list to store the agents | |
| ngl::TransformStack * | m_transform |
| the global transform stack, used for global rotation only so could be replaced with a single matrix if required | |
| ngl::Camera * | m_cam |
| a pointer to the current camera, this is used for accesing the VP matrix to load to the shader | |
| std::list< face * > | m_faces |
| list to hold the faces of the bounding box | |
| float | m_width |
| variable to define the width of the map | |
| float | m_height |
| variable to define the width of the map | |
| bool | m_add |
| variable to check if particles are added | |
| bool | m_initAgent |
| bool to check if the agents are created | |
| bool | m_pong |
| variable to check if pong is started | |
| bool | m_mazeGame |
| variable to check if the maze game is started | |
| ngl::BBox * | table |
| pointer to save the BBox of the mesh | |
| ngl::BBox | m_court |
| pointer to save the BBox of the mesh | |
| ngl::Vec3 | m_normals [6] |
| vector to save the normals | |
| ngl::Vec3 | m_verts [8] |
| vector to save the verts | |
| Map * | m_map |
| pointer to save the map | |
| Models * | m_model |
| pointer to save the model | |
| Parser * | m_parser |
| the object for the parser class to load the transformations to load the level | |
| std::vector< int > | m_obstaclePositions |
| the vector to hold the obstacle information read from the parser | |
| std::map< std::string, std::list< face * > > | m_objFaces |
| a map to hold our faces by name | |
| std::vector< ngl::Vec3 > | m_obstacles |
| a vector to save the obstacles | |
| std::list< GameEntity * > | m_gameEntities |
| a list to save the game entities | |
| AgentOctree * | collisionTree |
| a pointer to collision tree | |
| Graph * | m_graph |
| a pointer to graph | |
| bool | m_find |
| a bool to find shortest path | |
| Agent * | m_agent |
| a pointer to agent | |
| std::vector< ngl::Transformation > | m_levelTransform |
| a pointer to agent | |
Detailed Description
the variables and methods that a Environment contains put in this file
Definition at line 68 of file Environment.h.
Constructor & Destructor Documentation
| Environment::Environment | ( | ngl::TransformStack * | _t, | |
| ngl::Camera * | _cam | |||
| ) |
ctor
- Parameters:
-
[in] _t a pointer to the global transform stack [in] _cam a pointer to the global camera
| Environment::~Environment | ( | ) |
will explicitly call the Particle dtors as they are stored as pointers
Member Function Documentation
| void Environment::addAgent | ( | int | _index, | |
| std::string | _meshName, | |||
| std::string | _name | |||
| ) |
add a new User agent
- Parameters:
-
[in] the initial position on the graph node where the agent is placed [in] the mesh name that is associated with the agent [in] the unique name of the agent
| void Environment::addAgent | ( | std::string | _file, | |
| PyObject * | _main, | |||
| PyObject * | _dict, | |||
| int | _index, | |||
| std::string | _meshName, | |||
| float | _radius, | |||
| std::string | _type, | |||
| int | _id | |||
| ) |
add a new AI agent
- Parameters:
-
[in] the name of the python file to load, this will be stored so the file can be re-loaded. [in] Python variable main [in] Python variable dictionary [in] the initial index on the graph node where the agent is placed [in] the mesh name that is associated with the agent [in] the radius for boundary and collision checking [in] the type of the agent [in] the unique ID of the agent
| void Environment::addArmy | ( | PyObject * | _main, | |
| PyObject * | _dict | |||
| ) |
create a new Army with a set of artificial agents
- Parameters:
-
[in] Python variable main [in] Python variable dictionary
| void Environment::addNewFace | ( | ngl::Vec3 | _point, | |
| ngl::Vec3 | _normal, | |||
| face * | _face | |||
| ) |
| void Environment::addParticle | ( | ) |
add a new particle to the end of the list
- Parameters:
-
[in] _pos position of the new particle [in] _dir speed of the particle [in] _c the color of this sphere [in] _r the radius of this particle sphere [in] _ml the maximum life of this particle
| void Environment::agentAgentCollision | ( | ) |
method to check the agent agent collision
- Parameters:
-
[in] the _agent the artificial agent
| void Environment::agentObstacleCollision | ( | AIagent * | _agent | ) |
method to check the obstacle collision
- Parameters:
-
[in] the _agent the artificial agent
| void Environment::agentsQueryUpdate | ( | AIagent * | _agent | ) |
method to invoke the query from the agents
- Parameters:
-
[in] the _agent the artificial agent
| void Environment::agentWallCollision | ( | AIagent * | _agent | ) |
method to check the wall collision
- Parameters:
-
[in] the _agent the artificial agent
| void Environment::approachingAgent | ( | AIagent * | _agent | ) |
method to check the approaching agent
- Parameters:
-
[in] the _agent the artificial agent
| void Environment::assignPositions | ( | ) |
method to assign the positions of obstacles to keep a track of the obstacles
| void Environment::calculateBBox | ( | std::string | _name | ) |
method to calculate the faces of the bounding Box
- Parameters:
-
[in] the _name the mesh
| void Environment::calculateEdges | ( | ) |
method to calculate the edges for the nodes and set the contours around the nodes for better obstacle avoidance
| void Environment::checkBulletCollisions | ( | std::list< Ammo * > | _bullets | ) |
method to check the bullet collision with the obstacle or the agents
- Parameters:
-
[in] the list of bullets _bullets
| void Environment::checkUserEntityCollection | ( | ) |
method to check the user agent with the game entities
| void Environment::clearParticles | ( | ) |
a method to clear all particles
| void Environment::createAgents | ( | ) |
method to create the agents
| void Environment::draw | ( | ) |
draw all the particles using the particle draw method
| void Environment::drawBox | ( | ) |
method to toggle the drawing the bounding box

| void Environment::drawGrid | ( | ) |
method to draw the grid
| AIagent* Environment::getAgent | ( | int | _id | ) |
method to get the agent based on ID
- Parameters:
-
[in] the _id of the agent
| const ngl::Camera* Environment::getCamera | ( | ) | [inline] |
get the global camera
Definition at line 106 of file Environment.h.
References m_cam.
00106 {return m_cam;}
| int Environment::getNoOfBulletsLeftToPrint | ( | ) |
method to get the no of bullets of the user agent left
| unsigned int Environment::getNumParticles | ( | ) | const |
accessor for the number of particles stored in the class
- Returns:
- the number of particles
| int Environment::getPrecision | ( | ) | [inline] |
get the precision
Definition at line 133 of file Environment.h.
References m_precision.
00133 {return m_precision;}
| int Environment::getScoreToPrint | ( | ) |
method to get the score to print
| ngl::TransformStack* Environment::getTransformStack | ( | ) | const [inline] |
get the global transform stack
Definition at line 110 of file Environment.h.
References m_transform.
00110 {return m_transform;}
| void Environment::InitMap | ( | ) |
method to Initialize the map of the environment
| void Environment::processKeyDown | ( | QKeyEvent * | _event | ) |
processKeyDown passed from the main window class
- Parameters:
-
*_event a pointer to the QKeyEvent passed from main window class
| void Environment::processKeyUp | ( | QKeyEvent * | _event | ) |
processKeyUp passed from the main window class
- Parameters:
-
*_event a pointer to the QKeyEvent passed from main window class
| void Environment::resetObject | ( | ) |
a method to reset the environment

| void Environment::setGameEntityPositions | ( | ) |
method to set the Initial game entity positions like the gold coins and bullets
| void Environment::setMessage | ( | const std::string | _message | ) |
method to send messages to the AI agents
| void Environment::startPong | ( | ) |
method to start pong game

| void Environment::update | ( | ) |
update all the particles stored, if the particle died, delete it
Member Data Documentation
AgentOctree* Environment::collisionTree [private] |
a pointer to collision tree
Definition at line 363 of file Environment.h.
bool Environment::m_add [private] |
variable to check if particles are added
Definition at line 303 of file Environment.h.
Agent* Environment::m_agent [private] |
a pointer to agent
Definition at line 375 of file Environment.h.
std::list<Agent *> Environment::m_agents [private] |
a list to store the agents
Definition at line 278 of file Environment.h.
| float Environment::m_blueScore |
Definition at line 263 of file Environment.h.
ngl::Camera* Environment::m_cam [private] |
a pointer to the current camera, this is used for accesing the VP matrix to load to the shader
Definition at line 288 of file Environment.h.
ngl::BBox Environment::m_court [private] |
pointer to save the BBox of the mesh
Definition at line 323 of file Environment.h.
the bool to toggle drawBox
Definition at line 267 of file Environment.h.
std::list<face *> Environment::m_faces [private] |
list to hold the faces of the bounding box
Definition at line 291 of file Environment.h.
bool Environment::m_find [private] |
a bool to find shortest path
Definition at line 371 of file Environment.h.
std::list<GameEntity *> Environment::m_gameEntities [private] |
a list to save the game entities
Definition at line 359 of file Environment.h.
Graph* Environment::m_graph [private] |
a pointer to graph
Definition at line 367 of file Environment.h.
float Environment::m_height [private] |
variable to define the width of the map
Definition at line 299 of file Environment.h.
bool Environment::m_initAgent [private] |
bool to check if the agents are created
Definition at line 307 of file Environment.h.
std::vector<ngl::Transformation> Environment::m_levelTransform [private] |
a pointer to agent
Definition at line 379 of file Environment.h.
Map* Environment::m_map [private] |
pointer to save the map
Definition at line 335 of file Environment.h.
bool Environment::m_mazeGame [private] |
variable to check if the maze game is started
Definition at line 315 of file Environment.h.
Models* Environment::m_model [private] |
pointer to save the model
Definition at line 339 of file Environment.h.
ngl::Vec3 Environment::m_normals[6] [private] |
vector to save the normals
Definition at line 327 of file Environment.h.
std::map<std::string, std::list<face*> > Environment::m_objFaces [private] |
a map to hold our faces by name
Definition at line 351 of file Environment.h.
std::vector<int> Environment::m_obstaclePositions [private] |
the vector to hold the obstacle information read from the parser
Definition at line 347 of file Environment.h.
std::vector<ngl::Vec3> Environment::m_obstacles [private] |
a vector to save the obstacles
Definition at line 355 of file Environment.h.
Parser* Environment::m_parser [private] |
the object for the parser class to load the transformations to load the level
Definition at line 343 of file Environment.h.
bool Environment::m_pong [private] |
variable to check if pong is started
Definition at line 311 of file Environment.h.
float Environment::m_precision [private] |
a variable to store the precision value
Definition at line 274 of file Environment.h.
| float Environment::m_redScore |
Definition at line 262 of file Environment.h.
ngl::TransformStack* Environment::m_transform [private] |
the global transform stack, used for global rotation only so could be replaced with a single matrix if required
Definition at line 283 of file Environment.h.
ngl::Vec3 Environment::m_verts[8] [private] |
vector to save the verts
Definition at line 331 of file Environment.h.
float Environment::m_width [private] |
variable to define the width of the map
Definition at line 295 of file Environment.h.
ngl::BBox* Environment::table [private] |
pointer to save the BBox of the mesh
Definition at line 319 of file Environment.h.
The documentation for this class was generated from the following file: