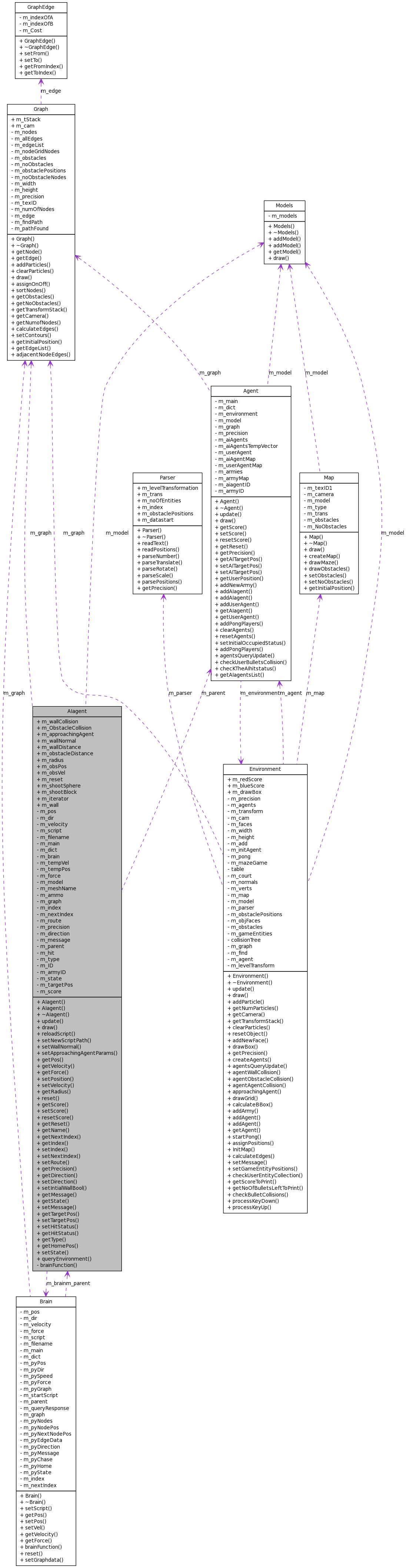
AIagent Class Reference
our AIagents and its methods and variables put in this file More...
#include <AIagent.h>
Public Member Functions | |
| AIagent (std::string _file, PyObject *_main, PyObject *_dict, int _index, std::string _meshName, float _radius, Models *_model, Graph *_graph, Agent *_parent, std::string _type, int _ID, int _armyID, std::string _state) | |
| ctor | |
| AIagent (Agent *_parent, std::string _file, PyObject *_main, PyObject *_dict, ngl::Vec3 _pos, std::string _type, float _radius, Models *_model, Graph *_graph, std::string _meshName, int _ID) | |
| ctor | |
| ~AIagent () | |
| dtor will clear the strings and close down the python interpretor | |
| void | update () |
| this method updates the agent | |
| void | draw (ngl::TransformStack *_tx, ngl::Camera *_cam) |
| draw the scene | |
| void | reloadScript () |
| delete the old script and re-load | |
| void | setNewScriptPath (const std::string &_p) |
| pass in a new script and load this replacing the old one | |
| void | setWallNormal (const ngl::Vec3 _normal, const float _dist) |
| set the wall normal and the distance of the wall when the agent collides with the wall | |
| void | setApproachingAgentParams (const float _dist, const ngl::Vec3 _pos, const ngl::Vec3 _vel) |
| set the approaching agent distance, velocity and position | |
| ngl::Vec3 | getPos () |
| get the agent position | |
| ngl::Vec3 | getVelocity () |
| get the agent velocity | |
| ngl::Vec3 | getForce () |
| get the agent force | |
| void | setPosition (const ngl::Vec3 pos) |
| set the agent position | |
| void | setVelocity (const ngl::Vec3 vel) |
| set the agent velocity | |
| float | getRadius () |
| get the agent mesh radius | |
| void | reset () |
| reset the agent | |
| float | getScore () |
| get the agent score | |
| void | setScore (const int _score) |
| set the agent score | |
| void | resetScore () |
| to reset the agent score | |
| int | getReset () |
| get the reset value | |
| std::string | getName () |
| get the agent name | |
| int | getNextIndex () |
| get the next index of the graph that the agent traverses | |
| int | getIndex () |
| get the index of the graph that the agent traverses | |
| void | setIndex (const int _index) |
| set the index of the graph that the agent traverses | |
| void | setNextIndex (const int _nextIndex) |
| set the index of the graph that the agent traverses | |
| void | setRoute (std::vector< int > _route) |
| set the route to the shortest path in the graph | |
| int | getPrecision () |
| get precision | |
| Direction | getDirection () |
| get the direction the agent is moving | |
| void | setDirection (int _direction) |
| set the direction | |
| void | setIntialWallBool (bool _wall) |
| set the initial bool value of the variable which indicates that the agent has not found the wall | |
| std::string | getMessage () |
| get the message the agent has | |
| std::string | getState () |
| get the state the agent is in | |
| void | setMessage (const std::string _message) |
| set the message of the agent | |
| ngl::Vec3 | getTargetPos () |
| get the target position that the agent is in pursuit | |
| void | setTargetPos (const ngl::Vec3 _pos) |
| set the target position | |
| void | setHitStatus () |
| set the hit status of the agent | |
| bool | getHitStatus () |
| get the hit status of the agent | |
| std::string | getType () |
| get the type of the agent | |
| ngl::Vec3 | getHomePos () |
| get the home position of the agents | |
| void | setState (const std::string _state) |
| set the state of the agents | |
| void | queryEnvironment () |
| a method to query the environment to ask about the collisions | |
Public Attributes | |
| bool | m_wallCollision |
| the bool to indicate the collision with wall | |
| bool | m_ObstacleCollision |
| the bool to indicate the collision with other object | |
| bool | m_approachingAgent |
| the bool to indicate the approaching agent | |
| ngl::Vec3 | m_wallNormal |
| the normal of the wall that the agent collided with | |
| float | m_wallDistance |
| the distance between the agent and the wall | |
| float | m_obstacleDistance |
| the distance between the agent and the object | |
| float | m_radius |
| the radius of the agent | |
| ngl::Vec3 | m_obsPos |
| the position of the approaching agent | |
| ngl::Vec3 | m_obsVel |
| the velocity of the approaching agent | |
| int | m_reset |
| a variable that indicates which agent is reset to calculate the score | |
| bool | m_shootSphere |
| the bool to indicate the shooting of spheres | |
| bool | m_shootBlock |
| the bool to indicate the shooting of block | |
| int | m_iterator |
| the iterator to retrive the route found by the shortest path | |
| bool | m_wall |
| the bool to indicate the initial wall found while maze solving | |
Private Member Functions | |
| void | brainFunction () |
Private Attributes | |
| ngl::Vec3 | m_pos |
| the position of the agent, this will be represented as pos in the python sctipt | |
| ngl::Vec3 | m_dir |
| the direction of the agent, this will be represented as dir in the python sctipt | |
| ngl::Vec3 | m_velocity |
| the speed of the agent, this will be represented as speed in the python sctipt | |
| std::string * | m_script |
| the source string of the python script to be run | |
| std::string | m_filename |
| the name of the source string loaded (for the re-load) | |
| PyObject * | m_main |
| these are the python object we are going to hook into the above objects | |
| PyObject * | m_dict |
| a pointer to the python dictionary for all variables in __main__ | |
| Brain * | m_brain |
| a pointer to the brain of the agent | |
| ngl::Vec3 | m_tempVel |
| a vector to hold the initial velocity used to reset | |
| ngl::Vec3 | m_tempPos |
| a vector to hold the initial position used to reset | |
| ngl::Vec3 | m_force |
| a vector to hold the initial force used to reset | |
| Models * | m_model |
| a pointer to hold the models variable | |
| std::string | m_meshName |
| a string to hold the mesh name | |
| std::list< Ammo * > | m_ammo |
| a list to hold the bullets | |
| Graph * | m_graph |
| a pointer to hold the graph variable | |
| int | m_index |
| a variable to hold the index valuable that the agent is traversing | |
| int | m_nextIndex |
| a variable to hold the nextIndex valuable that the agent is traversing | |
| std::vector< int > | m_route |
| _route the std::vector of ints that contains the indices the agent has to traverse | |
| int | m_precision |
| a variable to the precision | |
| Direction | m_direction |
| an enumerated variable to indicate the direction of the agent | |
| std::string | m_message |
| a variable to hold the message of the agent | |
| Agent * | m_parent |
| a pointer to the parent agent | |
| bool | m_hit |
| a bool to indicate if the agent is hit or not | |
| std::string | m_type |
| a variable to hold the type of the agent | |
| int | m_ID |
| a variable to hold the ID of the agent | |
| int | m_armyID |
| a variable to hold the army ID that the agent belongs to | |
| std::string | m_state |
| a variable to hold the state of the agent | |
| ngl::Vec3 | m_targetPos |
| a variable to hold the target position that the agent has to trvaers | |
| float | m_score |
| a variable to hold the score of the agent | |
Detailed Description
our AIagents and its methods and variables put in this file
Definition at line 60 of file AIagent.h.
Constructor & Destructor Documentation
| AIagent::AIagent | ( | std::string | _file, | |
| PyObject * | _main, | |||
| PyObject * | _dict, | |||
| int | _index, | |||
| std::string | _meshName, | |||
| float | _radius, | |||
| Models * | _model, | |||
| Graph * | _graph, | |||
| Agent * | _parent, | |||
| std::string | _type, | |||
| int | _ID, | |||
| int | _armyID, | |||
| std::string | _state | |||
| ) |
ctor
- Parameters:
-
[in] the name of the python file to load, this will be stored so the file can be re-loaded. [in] Python variable main [in] Python variable dictionary [in] the initial index on the graph node where the agent is placed [in] the mesh name that is associated with the agent [in] the radius for boundary and collision checking [in] the model variable for meshes [in] the graph variable for traversing [in] the type of the agent [in] the unique ID of the agent [in] the unique army to which the agent belongs to [in] the state in which the agent is created
| AIagent::AIagent | ( | Agent * | _parent, | |
| std::string | _file, | |||
| PyObject * | _main, | |||
| PyObject * | _dict, | |||
| ngl::Vec3 | _pos, | |||
| std::string | _type, | |||
| float | _radius, | |||
| Models * | _model, | |||
| Graph * | _graph, | |||
| std::string | _meshName, | |||
| int | _ID | |||
| ) |
ctor
- Parameters:
-
[in] the name of the python file to load, this will be stored so the file can be re-loaded. [in] Python variable main [in] Python variable dictionary [in] the initial position where the agent is placed [in] the type of the agent [in] the radius for boundary and collision checking [in] the model variable for meshes [in] the graph variable for traversing [in] the mesh name that is associated with the agent [in] the unique ID of the agent
| AIagent::~AIagent | ( | ) |
dtor will clear the strings and close down the python interpretor
Member Function Documentation
| void AIagent::brainFunction | ( | ) | [private] |
| void AIagent::draw | ( | ngl::TransformStack * | _tx, | |
| ngl::Camera * | _cam | |||
| ) |
draw the scene
- Parameters:
-
[in] _tx the transform stack of the current scene [in] _cam the current camera
| Direction AIagent::getDirection | ( | ) | [inline] |
get the direction the agent is moving
Definition at line 215 of file AIagent.h.
References m_direction.
00215 {return m_direction;}
| ngl::Vec3 AIagent::getForce | ( | ) | [inline] |
| bool AIagent::getHitStatus | ( | ) | [inline] |
| ngl::Vec3 AIagent::getHomePos | ( | ) | [inline] |
| int AIagent::getIndex | ( | ) | [inline] |
| std::string AIagent::getMessage | ( | ) | [inline] |
| std::string AIagent::getName | ( | ) | [inline] |
get the agent name
Definition at line 184 of file AIagent.h.
References m_meshName.
00184 {return m_meshName;}
| int AIagent::getNextIndex | ( | ) | [inline] |
get the next index of the graph that the agent traverses
Definition at line 188 of file AIagent.h.
References m_nextIndex.
00188 {return m_nextIndex;}
| ngl::Vec3 AIagent::getPos | ( | ) | [inline] |
| int AIagent::getPrecision | ( | ) | [inline] |
get precision
Definition at line 211 of file AIagent.h.
References m_precision.
00211 {return m_precision;}
| float AIagent::getRadius | ( | ) | [inline] |
get the agent mesh radius
Definition at line 159 of file AIagent.h.
References Models::getModel(), m_meshName, and m_model.
00159 {return m_model->getModel(m_meshName)->getSphereRadius();}

| int AIagent::getReset | ( | ) | [inline] |
| float AIagent::getScore | ( | ) | [inline] |
| std::string AIagent::getState | ( | ) | [inline] |
| ngl::Vec3 AIagent::getTargetPos | ( | ) | [inline] |
get the target position that the agent is in pursuit
Definition at line 242 of file AIagent.h.
References m_targetPos.
00242 {return m_targetPos;}
| std::string AIagent::getType | ( | ) | [inline] |
| ngl::Vec3 AIagent::getVelocity | ( | ) | [inline] |
get the agent velocity
Definition at line 141 of file AIagent.h.
References m_velocity.
00141 {return m_velocity;}
| void AIagent::queryEnvironment | ( | ) |
a method to query the environment to ask about the collisions
| void AIagent::reloadScript | ( | ) |
delete the old script and re-load
| void AIagent::reset | ( | ) |
reset the agent
| void AIagent::resetScore | ( | ) | [inline] |
| void AIagent::setApproachingAgentParams | ( | const float | _dist, | |
| const ngl::Vec3 | _pos, | |||
| const ngl::Vec3 | _vel | |||
| ) | [inline] |
set the approaching agent distance, velocity and position
- Parameters:
-
[in] _dist the distance of the agent _pos the position of the agent and _vel the velocity of the agent
Definition at line 133 of file AIagent.h.
References m_obsPos, m_obstacleDistance, and m_obsVel.
00133 {m_obstacleDistance = _dist; m_obsPos = _pos;m_obsVel = _vel;}
| void AIagent::setDirection | ( | int | _direction | ) |
set the direction
- Parameters:
-
[in] _int new direction value which corresponds to the enumerated direction
| void AIagent::setHitStatus | ( | ) | [inline] |
| void AIagent::setIndex | ( | const int | _index | ) | [inline] |
| void AIagent::setIntialWallBool | ( | bool | _wall | ) | [inline] |
| void AIagent::setMessage | ( | const std::string | _message | ) | [inline] |
| void AIagent::setNewScriptPath | ( | const std::string & | _p | ) |
pass in a new script and load this replacing the old one
- Parameters:
-
[in] _p the path / name of the script to load.
| void AIagent::setNextIndex | ( | const int | _nextIndex | ) | [inline] |
set the index of the graph that the agent traverses
- Parameters:
-
[in] _nextIndex the new index
Definition at line 202 of file AIagent.h.
References m_nextIndex.
00202 {m_nextIndex = _nextIndex;}
| void AIagent::setPosition | ( | const ngl::Vec3 | pos | ) | [inline] |
| void AIagent::setRoute | ( | std::vector< int > | _route | ) |
set the route to the shortest path in the graph
- Parameters:
-
[in] _route the std::vector of ints that contains the indices the agent has to traverse
| void AIagent::setScore | ( | const int | _score | ) | [inline] |
| void AIagent::setState | ( | const std::string | _state | ) | [inline] |
| void AIagent::setTargetPos | ( | const ngl::Vec3 | _pos | ) | [inline] |
set the target position
- Parameters:
-
[in] the new target position _pos
Definition at line 247 of file AIagent.h.
References m_targetPos.
00247 {m_targetPos = _pos;}
| void AIagent::setVelocity | ( | const ngl::Vec3 | vel | ) | [inline] |
set the agent velocity
- Parameters:
-
[in] _vel to set new velocity
Definition at line 155 of file AIagent.h.
References m_velocity.
00155 {m_velocity = vel;}
| void AIagent::setWallNormal | ( | const ngl::Vec3 | _normal, | |
| const float | _dist | |||
| ) | [inline] |
set the wall normal and the distance of the wall when the agent collides with the wall
- Parameters:
-
[in] _normal the normal of the wall and the _dist distance between the wall
Definition at line 128 of file AIagent.h.
References m_wallDistance, and m_wallNormal.
00128 {m_wallNormal = _normal;m_wallDistance = _dist;}
| void AIagent::update | ( | ) |
this method updates the agent
Member Data Documentation
std::list<Ammo *> AIagent::m_ammo [private] |
int AIagent::m_armyID [private] |
Brain* AIagent::m_brain [private] |
PyObject* AIagent::m_dict [private] |
ngl::Vec3 AIagent::m_dir [private] |
Direction AIagent::m_direction [private] |
std::string AIagent::m_filename [private] |
ngl::Vec3 AIagent::m_force [private] |
Graph* AIagent::m_graph [private] |
bool AIagent::m_hit [private] |
int AIagent::m_ID [private] |
int AIagent::m_index [private] |
PyObject* AIagent::m_main [private] |
std::string AIagent::m_meshName [private] |
std::string AIagent::m_message [private] |
Models* AIagent::m_model [private] |
int AIagent::m_nextIndex [private] |
| ngl::Vec3 AIagent::m_obsPos |
| ngl::Vec3 AIagent::m_obsVel |
Agent* AIagent::m_parent [private] |
ngl::Vec3 AIagent::m_pos [private] |
int AIagent::m_precision [private] |
| float AIagent::m_radius |
| int AIagent::m_reset |
std::vector<int> AIagent::m_route [private] |
float AIagent::m_score [private] |
std::string* AIagent::m_script [private] |
std::string AIagent::m_state [private] |
ngl::Vec3 AIagent::m_targetPos [private] |
ngl::Vec3 AIagent::m_tempPos [private] |
ngl::Vec3 AIagent::m_tempVel [private] |
std::string AIagent::m_type [private] |
ngl::Vec3 AIagent::m_velocity [private] |
| bool AIagent::m_wall |
| float AIagent::m_wallDistance |
| ngl::Vec3 AIagent::m_wallNormal |
The documentation for this class was generated from the following file: