Agent Class Reference
our agents and its basic atrributes put in this file More...
#include <Agent.h>
Public Member Functions | |
| Agent (Environment *_environment, Models *_model, Graph *_graph) | |
| ctor passing in the environment variable which is the parent in which the agents exist the models class variable which contains the meshes to draw Graph class for the nodes | |
| ~Agent () | |
| dtor will clear the agents it contains | |
| void | update () |
| this method updates all the agents | |
| void | draw (ngl::TransformStack *_tx, ngl::Camera *_cam) |
| draw the scene | |
| float | getScore () |
| get the score of the agent | |
| void | setScore (const int _score) |
| set the score of the agent | |
| void | resetScore () |
| reset the score of the agent | |
| int | getReset () |
| int | getPrecision () |
| get the precision value i.e, no of nodes per dimension in the node graph | |
| ngl::Vec3 | getAITargetPos (int _ID) |
| void | setAITargetPos (const ngl::Vec3 _pos, const int _ID) |
| set the target object position to the agent | |
| void | setAITargetPos (const ngl::Vec3 _pos) |
| set the target object position to all the agents | |
| ngl::Vec3 | getUserPosition (std::string _name) |
| get the user agent position | |
| void | addNewArmy (PyObject *_main, PyObject *_dict) |
| create a new Army with a set of artificial agents | |
| void | addAIagent (std::string _file, PyObject *_main, PyObject *_dict, int _index, std::string _meshName, float _radius, std::string _type, int _id, int _armyId, std::string _state) |
| add a new AI agent | |
| void | addAIagent (std::string _file, PyObject *_main, PyObject *_dict, ngl::Vec3 _pos, std::string _type, float _radius, std::string _meshName, int _ID) |
| add a new AI agent | |
| void | addUserAgent (int _index, std::string _meshName, std::string _name) |
| add a new User agent | |
| AIagent * | getAIagent (int _id) |
| get the AI agent | |
| UserAgent * | getUserAgent (std::string _name) |
| get the user agent | |
| void | addPongPlayers (PyObject *_main, PyObject *_dict) |
| add agents for the pong game | |
| void | clearAgents () |
| clear the agents | |
| void | resetAgents () |
| reset the agents to their home positions | |
| void | setInitialOccupiedStatus () |
| set the initial status of the nodes occupied by the agents to occupuied | |
| void | addPongPlayers (PyObject *_main, PyObject *_dict, ngl::Vec3 _pos1, ngl::Vec3 _pos2) |
| add agents fot the pong game | |
| void | agentsQueryUpdate (AIagent *_agent) |
| query the environment in each iteration for collisions and update | |
| void | checkUserBulletsCollision (std::list< Ammo * > _bullets) |
| the User bullets collision status | |
| void | checKTheAIhitstatus (Ammo *_ammo) |
| check if the agents are hit with the bullets | |
| std::list< AIagent * > | getAIagentsList () |
| get the list of AI agents | |
Private Attributes | |
| PyObject * | m_main |
| a hook into the python __main__ function where I program is to be run from | |
| PyObject * | m_dict |
| a pointer to the python dictionary for all variables in __main__ | |
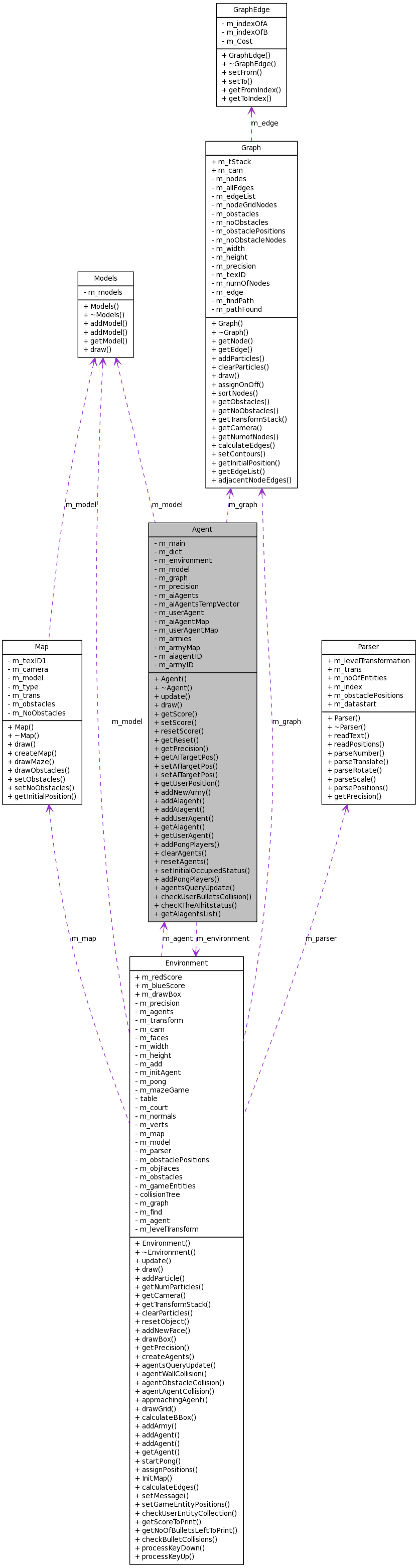
| Environment * | m_environment |
| a pointer to the environment variable | |
| Models * | m_model |
| a pointer to the models variable | |
| Graph * | m_graph |
| a pointer to the graph variable | |
| int | m_precision |
| a variable to specify the dimension of the graph | |
| std::list< AIagent * > | m_aiAgents |
| a list to hold the AI agents | |
| std::list< AIagent * > | m_aiAgentsTempVector |
| a temporary list to hold the AI agents while creating army with the agents | |
| std::list< UserAgent * > | m_userAgent |
| a list to hold the user agents | |
| std::map< int, AIagent * > | m_aiAgentMap |
| a map to hold the agents with the unique ID | |
| std::map< std::string, UserAgent * > | m_userAgentMap |
| a map to hold the user agents with the name | |
| std::list< Army * > | m_armies |
| a list to hold the armies | |
| std::map< int, Army * > | m_armyMap |
| a map of the armies with the ID | |
| int | m_aiagentID |
| a int to assign the agent ID | |
| int | m_armyID |
| a int to assign the army ID | |
Detailed Description
our agents and its basic atrributes put in this file
Definition at line 46 of file Agent.h.
Constructor & Destructor Documentation
| Agent::Agent | ( | Environment * | _environment, | |
| Models * | _model, | |||
| Graph * | _graph | |||
| ) |
ctor passing in the environment variable which is the parent in which the agents exist the models class variable which contains the meshes to draw Graph class for the nodes
- Parameters:
-
[in] the environment [in] the model [in] the graph
| Agent::~Agent | ( | ) |
dtor will clear the agents it contains
Member Function Documentation
| void Agent::addAIagent | ( | std::string | _file, | |
| PyObject * | _main, | |||
| PyObject * | _dict, | |||
| ngl::Vec3 | _pos, | |||
| std::string | _type, | |||
| float | _radius, | |||
| std::string | _meshName, | |||
| int | _ID | |||
| ) |
add a new AI agent
- Parameters:
-
[in] the name of the python file to load, this will be stored so the file can be re-loaded. [in] Python variable main [in] Python variable dictionary [in] the initial position where the agent is placed [in] the radius for boundary and collision checking [in] the type of the agent [in] the unique ID of the agent
| void Agent::addAIagent | ( | std::string | _file, | |
| PyObject * | _main, | |||
| PyObject * | _dict, | |||
| int | _index, | |||
| std::string | _meshName, | |||
| float | _radius, | |||
| std::string | _type, | |||
| int | _id, | |||
| int | _armyId, | |||
| std::string | _state | |||
| ) |
add a new AI agent
- Parameters:
-
[in] the name of the python file to load, this will be stored so the file can be re-loaded. [in] Python variable main [in] Python variable dictionary [in] the initial index on the graph node where the agent is placed [in] the mesh name that is associated with the agent [in] the radius for boundary and collision checking [in] the type of the agent [in] the unique ID of the agent [in] the unique army to which the agent belongs to [in] the state in which the agent is created
| void Agent::addNewArmy | ( | PyObject * | _main, | |
| PyObject * | _dict | |||
| ) |
create a new Army with a set of artificial agents
- Parameters:
-
[in] Python variable main [in] Python variable dictionary
| void Agent::addPongPlayers | ( | PyObject * | _main, | |
| PyObject * | _dict, | |||
| ngl::Vec3 | _pos1, | |||
| ngl::Vec3 | _pos2 | |||
| ) |
add agents fot the pong game
- Parameters:
-
[in] Python variables [in] Positions for the placement of the agents
| void Agent::addPongPlayers | ( | PyObject * | _main, | |
| PyObject * | _dict | |||
| ) |
add agents for the pong game
- Parameters:
-
[in] the python varialbes
| void Agent::addUserAgent | ( | int | _index, | |
| std::string | _meshName, | |||
| std::string | _name | |||
| ) |
add a new User agent
- Parameters:
-
[in] the initial index on the graph node where the agent is placed [in] the mesh name that is associated with the agent [in] the name of the agent
| void Agent::agentsQueryUpdate | ( | AIagent * | _agent | ) |
query the environment in each iteration for collisions and update
| void Agent::checKTheAIhitstatus | ( | Ammo * | _ammo | ) |
check if the agents are hit with the bullets
| void Agent::checkUserBulletsCollision | ( | std::list< Ammo * > | _bullets | ) |
the User bullets collision status
| void Agent::clearAgents | ( | ) |
clear the agents
| void Agent::draw | ( | ngl::TransformStack * | _tx, | |
| ngl::Camera * | _cam | |||
| ) |
draw the scene
- Parameters:
-
[in] _tx the transform stack of the current scene [in] _cam the current camera
| AIagent* Agent::getAIagent | ( | int | _id | ) |
get the AI agent
- Parameters:
-
[in] the unique index of the agent
| std::list<AIagent* > Agent::getAIagentsList | ( | ) | [inline] |
get the list of AI agents
Definition at line 200 of file Agent.h.
References m_aiAgents.
00200 {return m_aiAgents;}
| ngl::Vec3 Agent::getAITargetPos | ( | int | _ID | ) |
| int Agent::getPrecision | ( | ) |
get the precision value i.e, no of nodes per dimension in the node graph
- Parameters:
-
[out] the precision
| int Agent::getReset | ( | ) | [inline] |
| float Agent::getScore | ( | ) | [inline] |
get the score of the agent
- Parameters:
-
[out] the score of the agent
| UserAgent* Agent::getUserAgent | ( | std::string | _name | ) |
get the user agent
- Parameters:
-
[in] the name of the agent
| ngl::Vec3 Agent::getUserPosition | ( | std::string | _name | ) |
get the user agent position
| void Agent::resetAgents | ( | ) |
reset the agents to their home positions
| void Agent::resetScore | ( | ) | [inline] |
reset the score of the agent
| void Agent::setAITargetPos | ( | const ngl::Vec3 | _pos | ) |
set the target object position to all the agents
- Parameters:
-
[in] the new target position
| void Agent::setAITargetPos | ( | const ngl::Vec3 | _pos, | |
| const int | _ID | |||
| ) |
set the target object position to the agent
- Parameters:
-
[in] the new target position [in] the ID of the agent
| void Agent::setInitialOccupiedStatus | ( | ) |
set the initial status of the nodes occupied by the agents to occupuied
| void Agent::setScore | ( | const int | _score | ) | [inline] |
set the score of the agent
- Parameters:
-
[in] the new score of the agent
| void Agent::update | ( | ) |
this method updates all the agents
Member Data Documentation
int Agent::m_aiagentID [private] |
std::map<int, AIagent *> Agent::m_aiAgentMap [private] |
std::list<AIagent *> Agent::m_aiAgents [private] |
std::list<AIagent *> Agent::m_aiAgentsTempVector [private] |
std::list<Army* > Agent::m_armies [private] |
int Agent::m_armyID [private] |
std::map<int , Army *> Agent::m_armyMap [private] |
PyObject* Agent::m_dict [private] |
Environment* Agent::m_environment [private] |
Graph* Agent::m_graph [private] |
PyObject* Agent::m_main [private] |
Models* Agent::m_model [private] |
int Agent::m_precision [private] |
std::list<UserAgent *> Agent::m_userAgent [private] |
std::map<std::string, UserAgent*> Agent::m_userAgentMap [private] |
The documentation for this class was generated from the following file: