Map Class Reference
this is the class for map which sorts the obstacles in the environment and draws objects in that position More...
#include <Map.h>
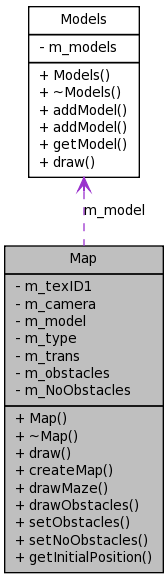
Collaboration diagram for Map:
Public Member Functions | |
| Map (ngl::Camera *_cam, Models *_model, std::vector< ngl::Transformation > _trans, std::vector< ngl::Vec3 > _obstacles) | |
| ctor | |
| ~Map () | |
| dtor | |
| void | draw (ngl::TransformStack *_tx, std::string _type, bool _box) |
| draw the scene | |
| void | createMap () |
| method to create and load map | |
| void | drawMaze (ngl::TransformStack *_tStack, bool _box) |
| draw the maze | |
| void | drawObstacles (ngl::TransformStack *_tStack, bool _box) |
| draw the maze | |
| void | setObstacles (const std::vector< ngl::Vec3 > _obstacles) |
| method to set the4 obstacle positions | |
| void | setNoObstacles (const std::vector< ngl::Vec3 > _NoObstacles) |
| method to set the no obstacle position | |
| ngl::Vec3 | getInitialPosition () |
| method to generate a random initial index for a random node position | |
Private Attributes | |
| GLuint | m_texID1 |
| variable to hold the texture | |
| ngl::Camera * | m_camera |
| pointer to hold the camera | |
| Models * | m_model |
| pointer to hold model | |
| std::string | m_type |
| variable to hold the string type | |
| std::vector< ngl::Transformation > | m_trans |
| variable to hold the transformation information | |
| std::vector< ngl::Vec3 > | m_obstacles |
| variable to hold the positions of the obstacles | |
| std::vector< ngl::Vec3 > | m_NoObstacles |
| pointer to hold the positions of the nodes without obstacles | |
Detailed Description
this is the class for map which sorts the obstacles in the environment and draws objects in that position
Definition at line 19 of file Map.h.
Constructor & Destructor Documentation
| Map::Map | ( | ngl::Camera * | _cam, | |
| Models * | _model, | |||
| std::vector< ngl::Transformation > | _trans, | |||
| std::vector< ngl::Vec3 > | _obstacles | |||
| ) |
ctor
- Parameters:
-
[in] the camera [in] the model variable for meshes [in] the transformation infromation for the obstacles [in] the vector with positions of obstacles
| Map::~Map | ( | ) |
dtor
Member Function Documentation
| void Map::createMap | ( | ) |
method to create and load map
| void Map::draw | ( | ngl::TransformStack * | _tx, | |
| std::string | _type, | |||
| bool | _box | |||
| ) |
draw the scene
- Parameters:
-
[in] _tx the transform stack of the current scene [in] _cam the current camera [in] _box bool to draw the box
| void Map::drawMaze | ( | ngl::TransformStack * | _tStack, | |
| bool | _box | |||
| ) |
draw the maze
- Parameters:
-
[in] _tx the transform stack of the current scene [in] _box bool to draw the box
| void Map::drawObstacles | ( | ngl::TransformStack * | _tStack, | |
| bool | _box | |||
| ) |
draw the maze
- Parameters:
-
[in] _tx the transform stack of the current scene [in] _box bool to draw the box
| ngl::Vec3 Map::getInitialPosition | ( | ) |
method to generate a random initial index for a random node position
| void Map::setNoObstacles | ( | const std::vector< ngl::Vec3 > | _NoObstacles | ) | [inline] |
method to set the no obstacle position
Definition at line 64 of file Map.h.
References m_NoObstacles.
00064 {m_NoObstacles = _NoObstacles;std::cout<<"the No obstacles "<<m_NoObstacles.size()<<std::endl;}
| void Map::setObstacles | ( | const std::vector< ngl::Vec3 > | _obstacles | ) | [inline] |
method to set the4 obstacle positions
Definition at line 60 of file Map.h.
References m_obstacles.
00060 {m_obstacles = _obstacles;std::cout<<"the obstacles "<<m_obstacles.size()<<std::endl;}
Member Data Documentation
ngl::Camera* Map::m_camera [private] |
Models* Map::m_model [private] |
std::vector<ngl::Vec3> Map::m_NoObstacles [private] |
std::vector<ngl::Vec3> Map::m_obstacles [private] |
GLuint Map::m_texID1 [private] |
std::vector<ngl::Transformation> Map::m_trans [private] |
std::string Map::m_type [private] |
The documentation for this class was generated from the following file: