|
Lagrangian Liquid Simulation
Master Thesis project on simulation of liquids using Lagrangian approach and SPH
|
|
Lagrangian Liquid Simulation
Master Thesis project on simulation of liquids using Lagrangian approach and SPH
|
contains all the UI extended from MainWindow.ui and our GLWindow More...
#include <MainApp.h>
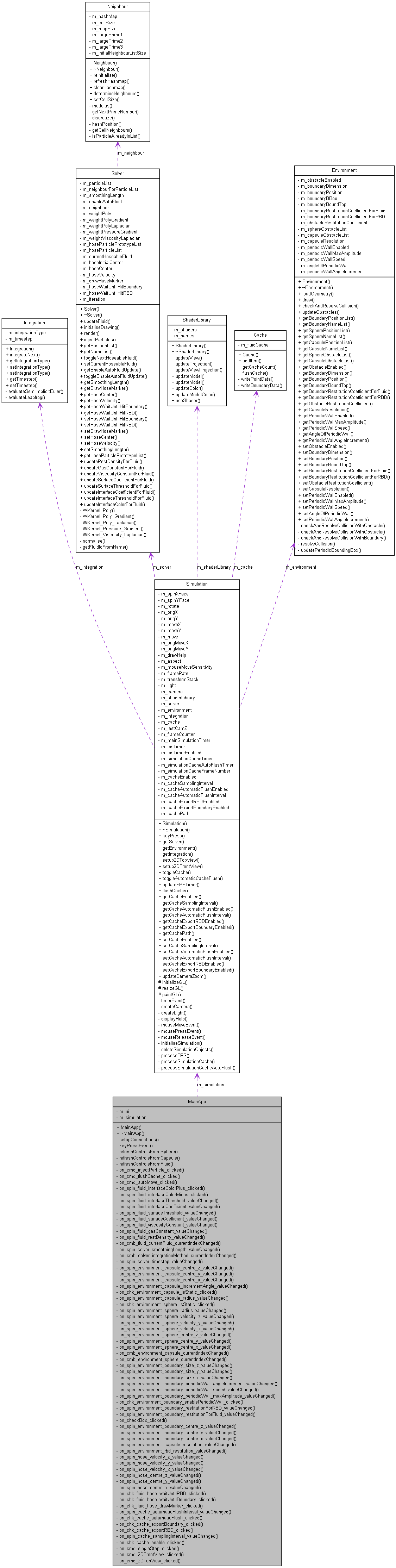
contains all the UI extended from MainWindow.ui and our GLWindow
| MainApp::MainApp | ( | QWidget * | _parent = 0 | ) |
ctor
| [in] | _parent | the main application window for the GUI |
Definition at line 13 of file MainApp.cpp.
:
QMainWindow(_parent),
m_ui(new Ui::MainWindow)
{
// setup the user interface
m_ui->setupUi(this);
//create a new instance of the world and give it an initial aspect ratio
m_simulation = new Simulation(this);
m_ui->s_mainGridLayout->addWidget(m_simulation, 0, 0, 4, 2);
//setup signals/slots
setupConnections();
}
| MainApp::~MainApp | ( | ) |
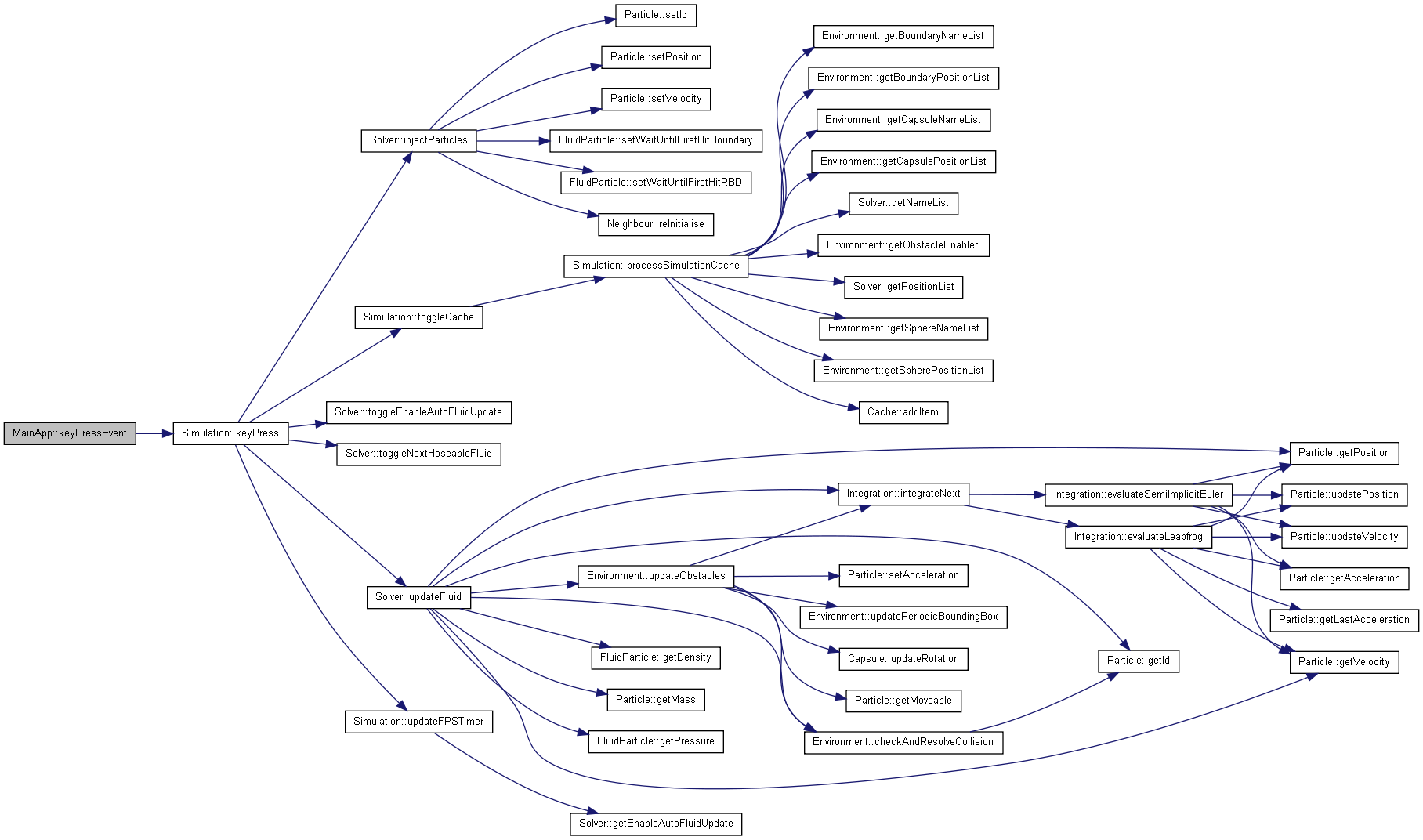
| void MainApp::keyPressEvent | ( | QKeyEvent * | _event | ) | [private] |
override the keyPressEvent inherited from QObject so we can handle key presses.
| [in] | _event | the event to process |
Definition at line 219 of file MainApp.cpp.
References Simulation::keyPress(), and m_simulation.
{
// this method is called every time the main window recives a key event.
this->setFocus(Qt::ActiveWindowFocusReason);
switch (_event->key())
{
case Qt::Key_Escape : QApplication::exit(EXIT_SUCCESS); break;
case Qt::Key_M : showFullScreen(); break;
case Qt::Key_N : showNormal(); break;
default : break;
}
m_simulation->keyPress(_event);
}
| void MainApp::on_checkBox_clicked | ( | bool | checked | ) | [private, slot] |
Definition at line 373 of file MainApp.cpp.
References Simulation::getEnvironment(), m_simulation, and Environment::setBoundaryBoundTop().
{
m_simulation->getEnvironment()->setBoundaryBoundTop(checked);
}

| void MainApp::on_chk_cache_automaticFlush_clicked | ( | bool | checked | ) | [private, slot] |
Definition at line 274 of file MainApp.cpp.
References m_simulation, Simulation::setCacheAutomaticFlushEnabled(), and Simulation::toggleCache().
{
m_simulation->setCacheAutomaticFlushEnabled(checked);
m_simulation->toggleCache();
}

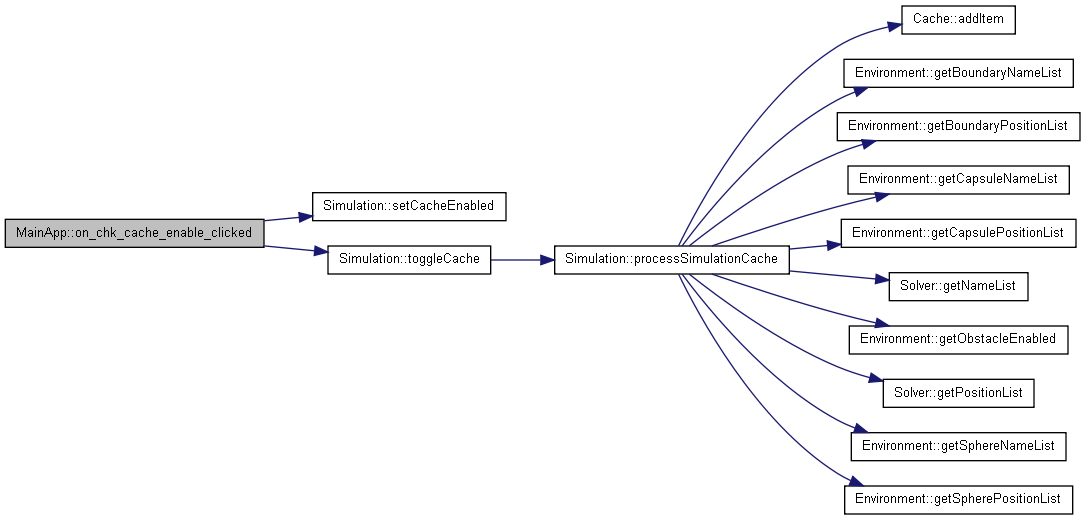
| void MainApp::on_chk_cache_enable_clicked | ( | bool | checked | ) | [private, slot] |
Definition at line 252 of file MainApp.cpp.
References m_simulation, Simulation::setCacheEnabled(), and Simulation::toggleCache().
{
m_simulation->setCacheEnabled(checked);
m_simulation->toggleCache();
}
| void MainApp::on_chk_cache_exportBoundary_clicked | ( | bool | checked | ) | [private, slot] |
Definition at line 269 of file MainApp.cpp.
References m_simulation, and Simulation::setCacheExportBoundaryEnabled().
{
m_simulation->setCacheExportBoundaryEnabled(checked);
}

| void MainApp::on_chk_cache_exportRBD_clicked | ( | bool | checked | ) | [private, slot] |
Definition at line 264 of file MainApp.cpp.
References m_simulation, and Simulation::setCacheExportRBDEnabled().
{
m_simulation->setCacheExportRBDEnabled(checked);
}

| void MainApp::on_chk_environment_boundary_enablePeriodicWall_clicked | ( | bool | checked | ) | [private, slot] |
Definition at line 388 of file MainApp.cpp.
References Simulation::getEnvironment(), m_simulation, and Environment::setPeriodicWallEnabled().
{
m_simulation->getEnvironment()->setPeriodicWallEnabled(checked);
}

| void MainApp::on_chk_environment_capsule_isStatic_clicked | ( | bool | checked | ) | [private, slot] |
Definition at line 554 of file MainApp.cpp.
References Environment::getCapsuleObstacleList(), Simulation::getEnvironment(), m_simulation, and m_ui.
{
//get currently selected capsule id
int id = m_ui->cmb_environment_capsule->currentIndex();
//update currently selected object
m_simulation->getEnvironment()->getCapsuleObstacleList()[id].setMoveable(!checked);
}

| void MainApp::on_chk_environment_sphere_isStatic_clicked | ( | bool | checked | ) | [private, slot] |
Definition at line 534 of file MainApp.cpp.
References Simulation::getEnvironment(), Environment::getSphereObstacleList(), m_simulation, and m_ui.
{
//get currently selected sphere id
int id = m_ui->cmb_environment_sphere->currentIndex();
//update currently selected object
m_simulation->getEnvironment()->getSphereObstacleList()[id].setMoveable(!checked);
}

| void MainApp::on_chk_fluid_hose_drawMarker_clicked | ( | bool | checked | ) | [private, slot] |
Definition at line 286 of file MainApp.cpp.
References Simulation::getSolver(), m_simulation, and Solver::setDrawHoseMarker().
{
m_simulation->getSolver()->setDrawHoseMarker(checked);
m_simulation->updateGL();
}

| void MainApp::on_chk_fluid_hose_waitUntilBoundary_clicked | ( | bool | checked | ) | [private, slot] |
Definition at line 293 of file MainApp.cpp.
References Simulation::getSolver(), m_simulation, and Solver::setHoseWaitUntilHitBoundary().
{
m_simulation->getSolver()->setHoseWaitUntilHitBoundary(checked);
}

| void MainApp::on_chk_fluid_hose_waitUntilRBD_clicked | ( | bool | checked | ) | [private, slot] |
Definition at line 298 of file MainApp.cpp.
References Simulation::getSolver(), m_simulation, and Solver::setHoseWaitUntilHitRBD().
{
m_simulation->getSolver()->setHoseWaitUntilHitRBD(checked);
}

| void MainApp::on_cmb_environment_capsule_currentIndexChanged | ( | int | index | ) | [private, slot] |
Definition at line 434 of file MainApp.cpp.
References refreshControlsFromCapsule().
{
refreshControlsFromCapsule(index);
}

| void MainApp::on_cmb_environment_sphere_currentIndexChanged | ( | int | index | ) | [private, slot] |
Definition at line 429 of file MainApp.cpp.
References refreshControlsFromSphere().
{
refreshControlsFromSphere(index);
}

| void MainApp::on_cmb_fluid_currentFluid_currentIndexChanged | ( | int | index | ) | [private, slot] |
Definition at line 629 of file MainApp.cpp.
References Simulation::getSolver(), m_simulation, refreshControlsFromFluid(), and Solver::setCurrentHoseableFluid().
{
m_simulation->getSolver()->setCurrentHoseableFluid(index);
refreshControlsFromFluid(index);
}

| void MainApp::on_cmb_solver_integrationMethod_currentIndexChanged | ( | int | index | ) | [private, slot] |
Definition at line 619 of file MainApp.cpp.
References Simulation::getIntegration(), m_simulation, and Integration::setIntegrationType().
{
m_simulation->getIntegration()->setIntegrationType(index);
}

| void MainApp::on_cmd_2DFrontView_clicked | ( | ) | [private, slot] |
Definition at line 246 of file MainApp.cpp.
References m_simulation, and Simulation::setup2DFrontView().
{
//setup front view
m_simulation->setup2DFrontView();
}

| void MainApp::on_cmd_2DTopView_clicked | ( | ) | [private, slot] |
Definition at line 240 of file MainApp.cpp.
References m_simulation, and Simulation::setup2DTopView().
{
//setup top view
m_simulation->setup2DTopView();
}

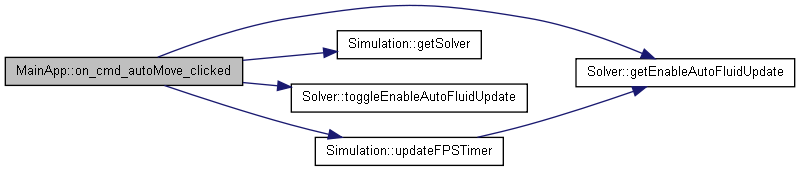
| void MainApp::on_cmd_autoMove_clicked | ( | ) | [private, slot] |
Definition at line 735 of file MainApp.cpp.
References Solver::getEnableAutoFluidUpdate(), Simulation::getSolver(), m_simulation, m_ui, Solver::toggleEnableAutoFluidUpdate(), and Simulation::updateFPSTimer().
{
m_ui->cmd_autoMove->setText(!m_simulation->getSolver()->getEnableAutoFluidUpdate() ? "AutoMove Stop" : "AutoMove Start");
m_simulation->getSolver()->toggleEnableAutoFluidUpdate();
m_simulation->updateFPSTimer();
m_simulation->updateGL();
}
| void MainApp::on_cmd_flushCache_clicked | ( | ) | [private, slot] |
Definition at line 745 of file MainApp.cpp.
References Simulation::flushCache(), and m_simulation.
{
m_simulation->flushCache();
}

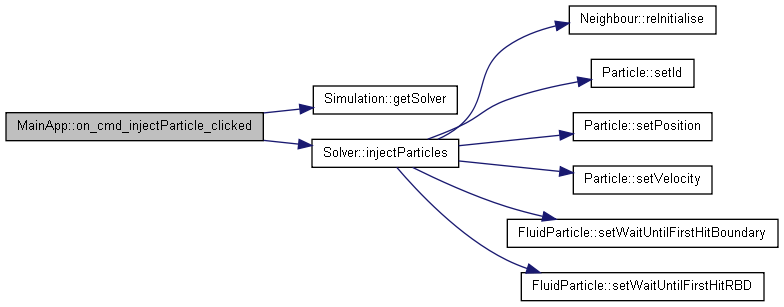
| void MainApp::on_cmd_injectParticle_clicked | ( | ) | [private, slot] |
Definition at line 750 of file MainApp.cpp.
References Simulation::getSolver(), Solver::injectParticles(), and m_simulation.
{
m_simulation->getSolver()->injectParticles();
}
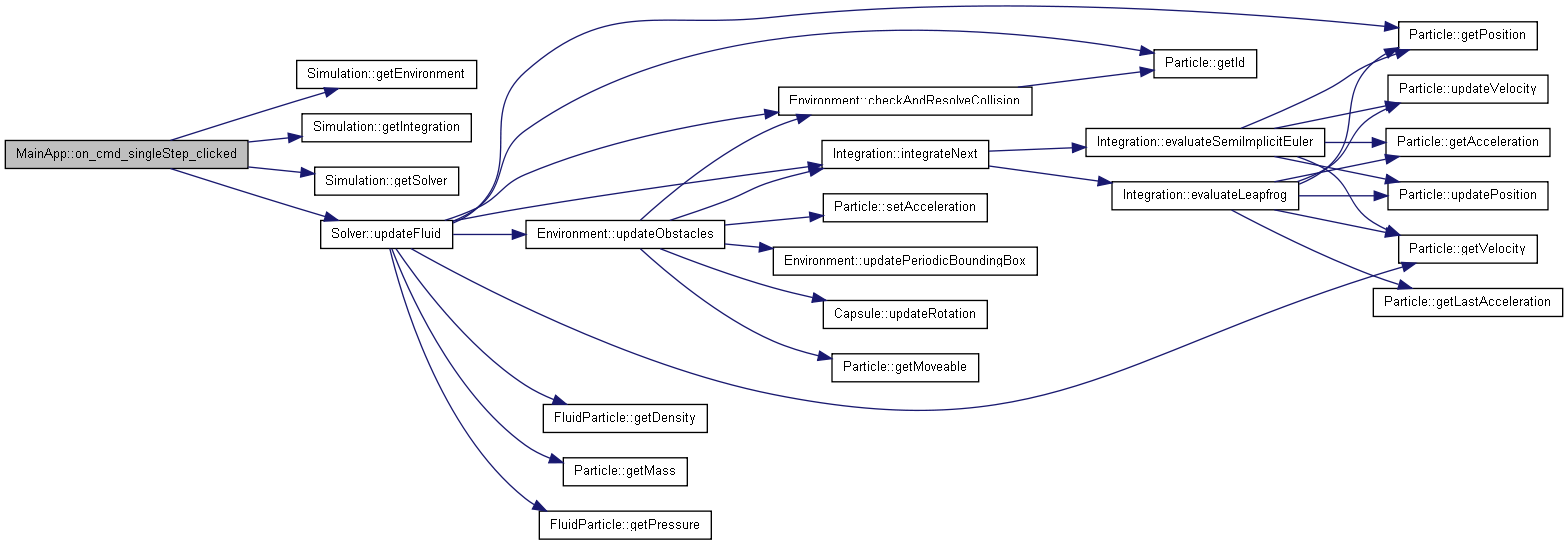
| void MainApp::on_cmd_singleStep_clicked | ( | ) | [private, slot] |
Definition at line 728 of file MainApp.cpp.
References Simulation::getEnvironment(), Simulation::getIntegration(), Simulation::getSolver(), m_simulation, and Solver::updateFluid().
{
m_simulation->getSolver()->updateFluid(m_simulation->getEnvironment(), m_simulation->getIntegration());
m_simulation->updateGL();
}
| void MainApp::on_spin_cache_automaticFlushInterval_valueChanged | ( | int | value | ) | [private, slot] |
Definition at line 280 of file MainApp.cpp.
References m_simulation, Simulation::setCacheAutomaticFlushInterval(), and Simulation::toggleAutomaticCacheFlush().
{
m_simulation->setCacheAutomaticFlushInterval(value * 1000); //s -> ms
m_simulation->toggleAutomaticCacheFlush();
}

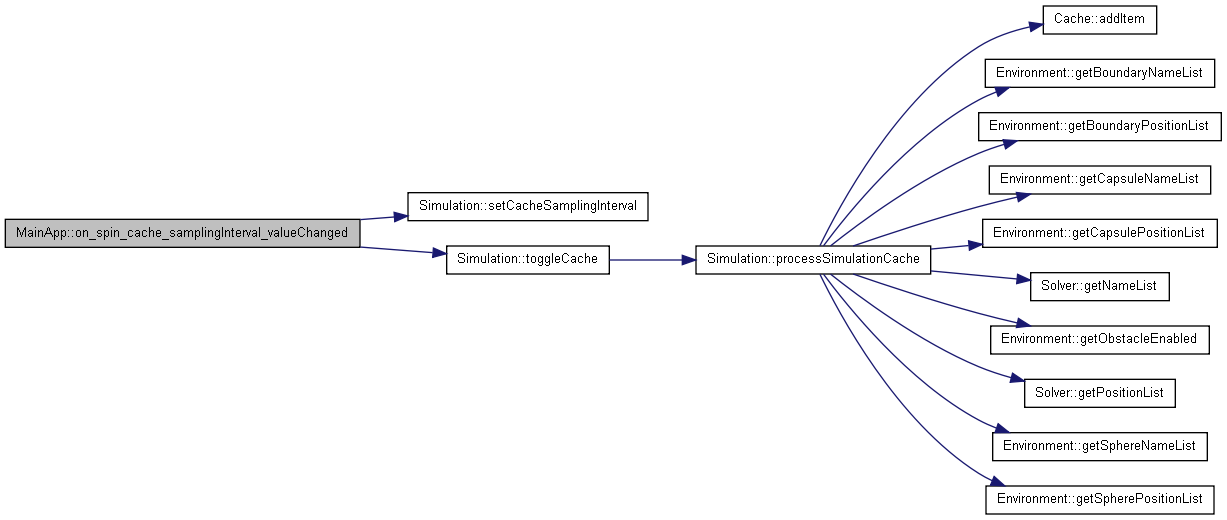
| void MainApp::on_spin_cache_samplingInterval_valueChanged | ( | int | value | ) | [private, slot] |
Definition at line 258 of file MainApp.cpp.
References m_simulation, Simulation::setCacheSamplingInterval(), and Simulation::toggleCache().
{
m_simulation->setCacheSamplingInterval(value);
m_simulation->toggleCache();
}
| void MainApp::on_spin_environment_boundary_centre_x_valueChanged | ( | int | value | ) | [private, slot] |
Definition at line 351 of file MainApp.cpp.
References Environment::getBoundaryPosition(), Simulation::getEnvironment(), m_simulation, and Environment::setBoundaryPosition().
{
m_simulation->getEnvironment()->setBoundaryPosition(ngl::Vector(value, m_simulation->getEnvironment()->getBoundaryPosition().m_y, m_simulation->getEnvironment()->getBoundaryPosition().m_z));
m_simulation->updateGL();
}

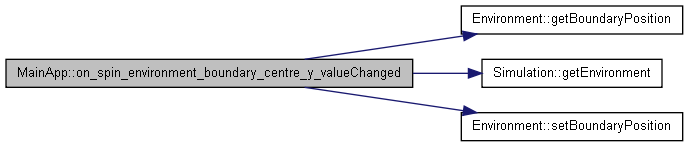
| void MainApp::on_spin_environment_boundary_centre_y_valueChanged | ( | int | value | ) | [private, slot] |
Definition at line 359 of file MainApp.cpp.
References Environment::getBoundaryPosition(), Simulation::getEnvironment(), m_simulation, and Environment::setBoundaryPosition().
{
m_simulation->getEnvironment()->setBoundaryPosition(ngl::Vector(m_simulation->getEnvironment()->getBoundaryPosition().m_x, value, m_simulation->getEnvironment()->getBoundaryPosition().m_z));
m_simulation->updateGL();
}
| void MainApp::on_spin_environment_boundary_centre_z_valueChanged | ( | int | value | ) | [private, slot] |
Definition at line 366 of file MainApp.cpp.
References Environment::getBoundaryPosition(), Simulation::getEnvironment(), m_simulation, and Environment::setBoundaryPosition().
{
m_simulation->getEnvironment()->setBoundaryPosition(ngl::Vector(m_simulation->getEnvironment()->getBoundaryPosition().m_x, m_simulation->getEnvironment()->getBoundaryPosition().m_y, value));
m_simulation->updateGL();
}

| void MainApp::on_spin_environment_boundary_periodicWall_angleIncrement_valueChanged | ( | int | value | ) | [private, slot] |
Definition at line 403 of file MainApp.cpp.
References Simulation::getEnvironment(), m_simulation, and Environment::setPeriodicWallAngleIncrement().
{
m_simulation->getEnvironment()->setPeriodicWallAngleIncrement(value);
}

| void MainApp::on_spin_environment_boundary_periodicWall_maxAmplitude_valueChanged | ( | int | value | ) | [private, slot] |
Definition at line 393 of file MainApp.cpp.
References Simulation::getEnvironment(), m_simulation, and Environment::setPeriodicWallMaxAmplitude().
{
m_simulation->getEnvironment()->setPeriodicWallMaxAmplitude(value);
}

| void MainApp::on_spin_environment_boundary_periodicWall_speed_valueChanged | ( | double | value | ) | [private, slot] |
Definition at line 398 of file MainApp.cpp.
References Simulation::getEnvironment(), m_simulation, and Environment::setPeriodicWallSpeed().
{
m_simulation->getEnvironment()->setPeriodicWallSpeed(value);
}

| void MainApp::on_spin_environment_boundary_restitutionForFluid_valueChanged | ( | double | value | ) | [private, slot] |
Definition at line 378 of file MainApp.cpp.
References Simulation::getEnvironment(), m_simulation, and Environment::setBoundaryRestitutionCoefficientForFluid().
{
m_simulation->getEnvironment()->setBoundaryRestitutionCoefficientForFluid(value);
}

| void MainApp::on_spin_environment_boundary_restitutionForRBD_valueChanged | ( | double | value | ) | [private, slot] |
Definition at line 383 of file MainApp.cpp.
References Simulation::getEnvironment(), m_simulation, and Environment::setBoundaryRestitutionCoefficientForRBD().
{
m_simulation->getEnvironment()->setBoundaryRestitutionCoefficientForRBD(value);
}

| void MainApp::on_spin_environment_boundary_size_x_valueChanged | ( | int | value | ) | [private, slot] |
Definition at line 408 of file MainApp.cpp.
References Environment::getBoundaryDimension(), Simulation::getEnvironment(), m_simulation, and Environment::setBoundaryDimension().
{
m_simulation->getEnvironment()->setBoundaryDimension(ngl::Vector(value, m_simulation->getEnvironment()->getBoundaryDimension().m_y, m_simulation->getEnvironment()->getBoundaryDimension().m_z));
m_simulation->updateGL();
}
| void MainApp::on_spin_environment_boundary_size_y_valueChanged | ( | int | value | ) | [private, slot] |
Definition at line 415 of file MainApp.cpp.
References Environment::getBoundaryDimension(), Simulation::getEnvironment(), m_simulation, and Environment::setBoundaryDimension().
{
m_simulation->getEnvironment()->setBoundaryDimension(ngl::Vector(m_simulation->getEnvironment()->getBoundaryDimension().m_x, value, m_simulation->getEnvironment()->getBoundaryDimension().m_z));
m_simulation->updateGL();
}
| void MainApp::on_spin_environment_boundary_size_z_valueChanged | ( | int | value | ) | [private, slot] |
Definition at line 422 of file MainApp.cpp.
References Environment::getBoundaryDimension(), Simulation::getEnvironment(), m_simulation, and Environment::setBoundaryDimension().
{
m_simulation->getEnvironment()->setBoundaryDimension(ngl::Vector(m_simulation->getEnvironment()->getBoundaryDimension().m_x, m_simulation->getEnvironment()->getBoundaryDimension().m_y, value));
m_simulation->updateGL();
}

| void MainApp::on_spin_environment_capsule_centre_x_valueChanged | ( | double | value | ) | [private, slot] |
Definition at line 572 of file MainApp.cpp.
References Environment::getCapsuleObstacleList(), Simulation::getEnvironment(), m_simulation, and m_ui.
{
//get currently selected capsule id
int id = m_ui->cmb_environment_capsule->currentIndex();
//get position
ngl::Vector pos = m_simulation->getEnvironment()->getCapsuleObstacleList()[id].getPosition();
//update currently selected object
m_simulation->getEnvironment()->getCapsuleObstacleList()[id].updatePosition(ngl::Vector(value, pos.m_y, pos.m_z));
m_simulation->updateGL();
}

| void MainApp::on_spin_environment_capsule_centre_y_valueChanged | ( | double | value | ) | [private, slot] |
Definition at line 586 of file MainApp.cpp.
References Environment::getCapsuleObstacleList(), Simulation::getEnvironment(), m_simulation, and m_ui.
{
//get currently selected capsule id
int id = m_ui->cmb_environment_capsule->currentIndex();
//get position
ngl::Vector pos = m_simulation->getEnvironment()->getCapsuleObstacleList()[id].getPosition();
//update currently selected object
m_simulation->getEnvironment()->getCapsuleObstacleList()[id].updatePosition(ngl::Vector(pos.m_x, value, pos.m_z));
m_simulation->updateGL();
}

| void MainApp::on_spin_environment_capsule_centre_z_valueChanged | ( | double | value | ) | [private, slot] |
Definition at line 600 of file MainApp.cpp.
References Environment::getCapsuleObstacleList(), Simulation::getEnvironment(), m_simulation, and m_ui.
{
//get currently selected capsule id
int id = m_ui->cmb_environment_capsule->currentIndex();
//get position
ngl::Vector pos = m_simulation->getEnvironment()->getCapsuleObstacleList()[id].getPosition();
//update currently selected object
m_simulation->getEnvironment()->getCapsuleObstacleList()[id].updatePosition(ngl::Vector(pos.m_x, pos.m_y, value));
m_simulation->updateGL();
}

| void MainApp::on_spin_environment_capsule_incrementAngle_valueChanged | ( | int | value | ) | [private, slot] |
Definition at line 563 of file MainApp.cpp.
References Environment::getCapsuleObstacleList(), Simulation::getEnvironment(), m_simulation, and m_ui.
{
//get currently selected capsule id
int id = m_ui->cmb_environment_capsule->currentIndex();
//update currently selected object
m_simulation->getEnvironment()->getCapsuleObstacleList()[id].setIncrementAngle(value);
}

| void MainApp::on_spin_environment_capsule_radius_valueChanged | ( | double | value | ) | [private, slot] |
Definition at line 543 of file MainApp.cpp.
References Environment::getCapsuleObstacleList(), Simulation::getEnvironment(), m_simulation, and m_ui.
{
//get currently selected capsule id
int id = m_ui->cmb_environment_capsule->currentIndex();
//update currently selected object
m_simulation->getEnvironment()->getCapsuleObstacleList()[id].setRadius(value);
m_simulation->updateGL();
}

| void MainApp::on_spin_environment_capsule_resolution_valueChanged | ( | int | value | ) | [private, slot] |
Definition at line 344 of file MainApp.cpp.
References Simulation::getEnvironment(), m_simulation, and Environment::setCapsuleResolution().
{
m_simulation->getEnvironment()->setCapsuleResolution(value);
m_simulation->updateGL();
}

| void MainApp::on_spin_environment_rbd_restitution_valueChanged | ( | double | value | ) | [private, slot] |
Definition at line 339 of file MainApp.cpp.
References Simulation::getEnvironment(), m_simulation, and Environment::setObstacleRestitutionCoefficient().
{
m_simulation->getEnvironment()->setObstacleRestitutionCoefficient(value);
}

| void MainApp::on_spin_environment_sphere_centre_x_valueChanged | ( | int | value | ) | [private, slot] |
Definition at line 439 of file MainApp.cpp.
References Simulation::getEnvironment(), Environment::getSphereObstacleList(), m_simulation, and m_ui.
{
//get currently selected sphere id
int id = m_ui->cmb_environment_sphere->currentIndex();
//get position
ngl::Vector pos = m_simulation->getEnvironment()->getSphereObstacleList()[id].getPosition();
//update currently selected object
m_simulation->getEnvironment()->getSphereObstacleList()[id].updatePosition(ngl::Vector(value, pos.m_y, pos.m_z));
m_simulation->updateGL();
}

| void MainApp::on_spin_environment_sphere_centre_y_valueChanged | ( | int | value | ) | [private, slot] |
Definition at line 453 of file MainApp.cpp.
References Simulation::getEnvironment(), Environment::getSphereObstacleList(), m_simulation, and m_ui.
{
//get currently selected sphere id
int id = m_ui->cmb_environment_sphere->currentIndex();
//get position
ngl::Vector pos = m_simulation->getEnvironment()->getSphereObstacleList()[id].getPosition();
//update currently selected object
m_simulation->getEnvironment()->getSphereObstacleList()[id].updatePosition(ngl::Vector(pos.m_x, value, pos.m_z));
m_simulation->updateGL();
}

| void MainApp::on_spin_environment_sphere_centre_z_valueChanged | ( | int | value | ) | [private, slot] |
Definition at line 467 of file MainApp.cpp.
References Simulation::getEnvironment(), Environment::getSphereObstacleList(), m_simulation, and m_ui.
{
//get currently selected sphere id
int id = m_ui->cmb_environment_sphere->currentIndex();
//get position
ngl::Vector pos = m_simulation->getEnvironment()->getSphereObstacleList()[id].getPosition();
//update currently selected object
m_simulation->getEnvironment()->getSphereObstacleList()[id].updatePosition(ngl::Vector(pos.m_x, pos.m_y, value));
m_simulation->updateGL();
}

| void MainApp::on_spin_environment_sphere_radius_valueChanged | ( | double | value | ) | [private, slot] |
Definition at line 523 of file MainApp.cpp.
References Simulation::getEnvironment(), Environment::getSphereObstacleList(), m_simulation, and m_ui.
{
//get currently selected sphere id
int id = m_ui->cmb_environment_sphere->currentIndex();
//update currently selected object
m_simulation->getEnvironment()->getSphereObstacleList()[id].setRadius(value);
m_simulation->updateGL();
}

| void MainApp::on_spin_environment_sphere_velocity_x_valueChanged | ( | int | value | ) | [private, slot] |
Definition at line 481 of file MainApp.cpp.
References Simulation::getEnvironment(), Environment::getSphereObstacleList(), m_simulation, and m_ui.
{
//get currently selected sphere id
int id = m_ui->cmb_environment_sphere->currentIndex();
//get velocity
ngl::Vector pos = m_simulation->getEnvironment()->getSphereObstacleList()[id].getVelocity();
//update currently selected object
m_simulation->getEnvironment()->getSphereObstacleList()[id].updateVelocity(ngl::Vector(value, pos.m_y, pos.m_z));
m_simulation->updateGL();
}

| void MainApp::on_spin_environment_sphere_velocity_y_valueChanged | ( | int | value | ) | [private, slot] |
Definition at line 495 of file MainApp.cpp.
References Simulation::getEnvironment(), Environment::getSphereObstacleList(), m_simulation, and m_ui.
{
//get currently selected sphere id
int id = m_ui->cmb_environment_sphere->currentIndex();
//get position
ngl::Vector pos = m_simulation->getEnvironment()->getSphereObstacleList()[id].getVelocity();
//update currently selected object
m_simulation->getEnvironment()->getSphereObstacleList()[id].updateVelocity(ngl::Vector(pos.m_x, value, pos.m_z));
m_simulation->updateGL();
}

| void MainApp::on_spin_environment_sphere_velocity_z_valueChanged | ( | int | value | ) | [private, slot] |
Definition at line 509 of file MainApp.cpp.
References Simulation::getEnvironment(), Environment::getSphereObstacleList(), m_simulation, and m_ui.
{
//get currently selected sphere id
int id = m_ui->cmb_environment_sphere->currentIndex();
//get position
ngl::Vector pos = m_simulation->getEnvironment()->getSphereObstacleList()[id].getVelocity();
//update currently selected object
m_simulation->getEnvironment()->getSphereObstacleList()[id].updateVelocity(ngl::Vector(pos.m_x, pos.m_y, value));
m_simulation->updateGL();
}

| void MainApp::on_spin_fluid_gasConstant_valueChanged | ( | double | value | ) | [private, slot] |
Definition at line 645 of file MainApp.cpp.
References Simulation::getSolver(), m_simulation, m_ui, and Solver::updateGasConstantForFluid().
{
//get currently selected fluid id
int id = m_ui->cmb_fluid_currentFluid->currentIndex();
//update currently selected object
m_simulation->getSolver()->updateGasConstantForFluid(id, value);
}

| void MainApp::on_spin_fluid_interfaceCoefficient_valueChanged | ( | double | value | ) | [private, slot] |
Definition at line 681 of file MainApp.cpp.
References Simulation::getSolver(), m_simulation, m_ui, and Solver::updateInterfaceCoefficientForFluid().
{
//get currently selected fluid id
int id = m_ui->cmb_fluid_currentFluid->currentIndex();
//update currently selected object
m_simulation->getSolver()->updateInterfaceCoefficientForFluid(id, value);
}

| void MainApp::on_spin_fluid_interfaceColorMinus_clicked | ( | bool | checked | ) | [private, slot] |
Definition at line 699 of file MainApp.cpp.
References Simulation::getSolver(), m_simulation, m_ui, and Solver::updateInterfaceColorForFluid().
{
//get currently selected fluid id
int id = m_ui->cmb_fluid_currentFluid->currentIndex();
if (checked)
//update currently selected object
m_simulation->getSolver()->updateInterfaceColorForFluid(id, -0.5);
else
//update currently selected object
m_simulation->getSolver()->updateInterfaceColorForFluid(id, 0.5);
}

| void MainApp::on_spin_fluid_interfaceColorPlus_clicked | ( | bool | checked | ) | [private, slot] |
Definition at line 714 of file MainApp.cpp.
References Simulation::getSolver(), m_simulation, m_ui, and Solver::updateInterfaceColorForFluid().
{
//get currently selected fluid id
int id = m_ui->cmb_fluid_currentFluid->currentIndex();
if (checked)
//update currently selected object
m_simulation->getSolver()->updateInterfaceColorForFluid(id, 0.5);
else
//update currently selected object
m_simulation->getSolver()->updateInterfaceColorForFluid(id, -0.5);
}

| void MainApp::on_spin_fluid_interfaceThreshold_valueChanged | ( | double | value | ) | [private, slot] |
Definition at line 690 of file MainApp.cpp.
References Simulation::getSolver(), m_simulation, m_ui, and Solver::updateInterfaceThresholdForFluid().
{
//get currently selected fluid id
int id = m_ui->cmb_fluid_currentFluid->currentIndex();
//update currently selected object
m_simulation->getSolver()->updateInterfaceThresholdForFluid(id, value);
}

| void MainApp::on_spin_fluid_restDensity_valueChanged | ( | double | value | ) | [private, slot] |
Definition at line 636 of file MainApp.cpp.
References Simulation::getSolver(), m_simulation, m_ui, and Solver::updateRestDensityForFluid().
{
//get currently selected fluid id
int id = m_ui->cmb_fluid_currentFluid->currentIndex();
//update currently selected object
m_simulation->getSolver()->updateRestDensityForFluid(id, value);
}

| void MainApp::on_spin_fluid_surfaceCoefficient_valueChanged | ( | double | value | ) | [private, slot] |
Definition at line 663 of file MainApp.cpp.
References Simulation::getSolver(), m_simulation, m_ui, and Solver::updateSurfaceCoefficientForFluid().
{
//get currently selected fluid id
int id = m_ui->cmb_fluid_currentFluid->currentIndex();
//update currently selected object
m_simulation->getSolver()->updateSurfaceCoefficientForFluid(id, value);
}

| void MainApp::on_spin_fluid_surfaceThreshold_valueChanged | ( | double | value | ) | [private, slot] |
Definition at line 672 of file MainApp.cpp.
References Simulation::getSolver(), m_simulation, m_ui, and Solver::updateSurfaceThresholdForFluid().
{
//get currently selected fluid id
int id = m_ui->cmb_fluid_currentFluid->currentIndex();
//update currently selected object
m_simulation->getSolver()->updateSurfaceThresholdForFluid(id, value);
}

| void MainApp::on_spin_fluid_viscosityConstant_valueChanged | ( | double | value | ) | [private, slot] |
Definition at line 654 of file MainApp.cpp.
References Simulation::getSolver(), m_simulation, m_ui, and Solver::updateViscosityConstantForFluid().
{
//get currently selected fluid id
int id = m_ui->cmb_fluid_currentFluid->currentIndex();
//update currently selected object
m_simulation->getSolver()->updateViscosityConstantForFluid(id, value);
}

| void MainApp::on_spin_hose_centre_x_valueChanged | ( | int | value | ) | [private, slot] |
Definition at line 303 of file MainApp.cpp.
References Solver::getHoseCenter(), Simulation::getSolver(), m_simulation, and Solver::setHoseCenter().
{
m_simulation->getSolver()->setHoseCenter(ngl::Vector(value, m_simulation->getSolver()->getHoseCenter().m_y, m_simulation->getSolver()->getHoseCenter().m_z));
m_simulation->updateGL();
}

| void MainApp::on_spin_hose_centre_y_valueChanged | ( | int | value | ) | [private, slot] |
Definition at line 310 of file MainApp.cpp.
References Solver::getHoseCenter(), Simulation::getSolver(), m_simulation, and Solver::setHoseCenter().
{
m_simulation->getSolver()->setHoseCenter(ngl::Vector(m_simulation->getSolver()->getHoseCenter().m_x, value, m_simulation->getSolver()->getHoseCenter().m_z));
m_simulation->updateGL();
}
| void MainApp::on_spin_hose_centre_z_valueChanged | ( | int | value | ) | [private, slot] |
Definition at line 317 of file MainApp.cpp.
References Solver::getHoseCenter(), Simulation::getSolver(), m_simulation, and Solver::setHoseCenter().
{
m_simulation->getSolver()->setHoseCenter(ngl::Vector(m_simulation->getSolver()->getHoseCenter().m_x, m_simulation->getSolver()->getHoseCenter().m_y, value));
m_simulation->updateGL();
}

| void MainApp::on_spin_hose_velocity_x_valueChanged | ( | int | value | ) | [private, slot] |
Definition at line 324 of file MainApp.cpp.
References Solver::getHoseVelocity(), Simulation::getSolver(), m_simulation, and Solver::setHoseVelocity().
{
m_simulation->getSolver()->setHoseVelocity(ngl::Vector(value, m_simulation->getSolver()->getHoseVelocity().m_y, m_simulation->getSolver()->getHoseVelocity().m_z));
}
| void MainApp::on_spin_hose_velocity_y_valueChanged | ( | int | value | ) | [private, slot] |
Definition at line 329 of file MainApp.cpp.
References Solver::getHoseVelocity(), Simulation::getSolver(), m_simulation, and Solver::setHoseVelocity().
{
m_simulation->getSolver()->setHoseVelocity(ngl::Vector(m_simulation->getSolver()->getHoseVelocity().m_x, value, m_simulation->getSolver()->getHoseVelocity().m_z));
}
| void MainApp::on_spin_hose_velocity_z_valueChanged | ( | int | value | ) | [private, slot] |
Definition at line 334 of file MainApp.cpp.
References Solver::getHoseVelocity(), Simulation::getSolver(), m_simulation, and Solver::setHoseVelocity().
{
m_simulation->getSolver()->setHoseVelocity(ngl::Vector(m_simulation->getSolver()->getHoseVelocity().m_x, m_simulation->getSolver()->getHoseVelocity().m_y, value));
}

| void MainApp::on_spin_solver_smoothingLength_valueChanged | ( | double | value | ) | [private, slot] |
Definition at line 624 of file MainApp.cpp.
References Simulation::getSolver(), m_simulation, and Solver::setSmoothingLength().
{
m_simulation->getSolver()->setSmoothingLength(value);
}

| void MainApp::on_spin_solver_timestep_valueChanged | ( | double | value | ) | [private, slot] |
Definition at line 614 of file MainApp.cpp.
References Simulation::getIntegration(), m_simulation, and Integration::setTimestep().
{
m_simulation->getIntegration()->setTimestep(value);
}

| void MainApp::refreshControlsFromCapsule | ( | const int | _capsuleId | ) | [private] |
updates the gui with the parameters of a newly selected capsule
| [in] | _capsuleId | the capsule id selected |
Definition at line 202 of file MainApp.cpp.
References Environment::getCapsuleObstacleList(), Simulation::getEnvironment(), m_simulation, and m_ui.
{
//centre
m_ui->spin_environment_capsule_centre_x->setValue(m_simulation->getEnvironment()->getCapsuleObstacleList()[_capsuleId].getPosition().m_x);
m_ui->spin_environment_capsule_centre_y->setValue(m_simulation->getEnvironment()->getCapsuleObstacleList()[_capsuleId].getPosition().m_y);
m_ui->spin_environment_capsule_centre_z->setValue(m_simulation->getEnvironment()->getCapsuleObstacleList()[_capsuleId].getPosition().m_z);
//angle
m_ui->spin_environment_capsule_incrementAngle->setValue(m_simulation->getEnvironment()->getCapsuleObstacleList()[_capsuleId].getIncrementAngle());
//radius
m_ui->spin_environment_capsule_radius->setValue(m_simulation->getEnvironment()->getCapsuleObstacleList()[_capsuleId].getRadius());
//static
m_ui->chk_environment_capsule_isStatic->setChecked(!m_simulation->getEnvironment()->getCapsuleObstacleList()[_capsuleId].getMoveable());
}


| void MainApp::refreshControlsFromFluid | ( | const int | _fluidId | ) | [private] |
updates the gui with the parameters of a newly selected fluid
| [in] | _fluidId | the fluid id selected |
Definition at line 158 of file MainApp.cpp.
References Solver::getHoseParticlePrototypeList(), Simulation::getSolver(), m_simulation, and m_ui.
{
//density
m_ui->spin_fluid_restDensity->setValue(m_simulation->getSolver()->getHoseParticlePrototypeList()[_fluidId].getMaterialRestDensity());
//gas constant
m_ui->spin_fluid_gasConstant->setValue(m_simulation->getSolver()->getHoseParticlePrototypeList()[_fluidId].getGasConstant());
//viscosity constant
m_ui->spin_fluid_viscosityConstant->setValue(m_simulation->getSolver()->getHoseParticlePrototypeList()[_fluidId].getViscosityConstant());
//surface tension
m_ui->spin_fluid_surfaceCoefficient->setValue(m_simulation->getSolver()->getHoseParticlePrototypeList()[_fluidId].getSurfaceTensionCoefficient());
m_ui->spin_fluid_surfaceThreshold->setValue(m_simulation->getSolver()->getHoseParticlePrototypeList()[_fluidId].getSurfaceTensionThreshold());
//interface tension
m_ui->spin_fluid_interfaceCoefficient->setValue(m_simulation->getSolver()->getHoseParticlePrototypeList()[_fluidId].getInterfaceTensionCoefficient());
m_ui->spin_fluid_interfaceThreshold->setValue(m_simulation->getSolver()->getHoseParticlePrototypeList()[_fluidId].getInterfaceTensionThreshold());
//interface color
bool minus = m_simulation->getSolver()->getHoseParticlePrototypeList()[_fluidId].getInterfaceColorCoefficient() < 0;
m_ui->spin_fluid_interfaceColorMinus->setChecked(minus);
m_ui->spin_fluid_interfaceColorPlus->setChecked(!minus);
}


| void MainApp::refreshControlsFromSphere | ( | const int | _sphereId | ) | [private] |
updates the gui with the parameters of a newly selected sphere
| [in] | _sphereId | the sphere id selected |
Definition at line 183 of file MainApp.cpp.
References Simulation::getEnvironment(), Environment::getSphereObstacleList(), m_simulation, and m_ui.
{
//position
m_ui->spin_environment_sphere_centre_x->setValue(m_simulation->getEnvironment()->getSphereObstacleList()[_sphereId].getPosition().m_x);
m_ui->spin_environment_sphere_centre_y->setValue(m_simulation->getEnvironment()->getSphereObstacleList()[_sphereId].getPosition().m_y);
m_ui->spin_environment_sphere_centre_z->setValue(m_simulation->getEnvironment()->getSphereObstacleList()[_sphereId].getPosition().m_z);
//velocity
m_ui->spin_environment_sphere_velocity_x->setValue(m_simulation->getEnvironment()->getSphereObstacleList()[_sphereId].getVelocity().m_x);
m_ui->spin_environment_sphere_velocity_y->setValue(m_simulation->getEnvironment()->getSphereObstacleList()[_sphereId].getVelocity().m_y);
m_ui->spin_environment_sphere_velocity_z->setValue(m_simulation->getEnvironment()->getSphereObstacleList()[_sphereId].getVelocity().m_z);
//radius
m_ui->spin_environment_sphere_radius->setValue(m_simulation->getEnvironment()->getSphereObstacleList()[_sphereId].getRadius());
//static
m_ui->chk_environment_sphere_isStatic->setChecked(!m_simulation->getEnvironment()->getSphereObstacleList()[_sphereId].getMoveable());
}


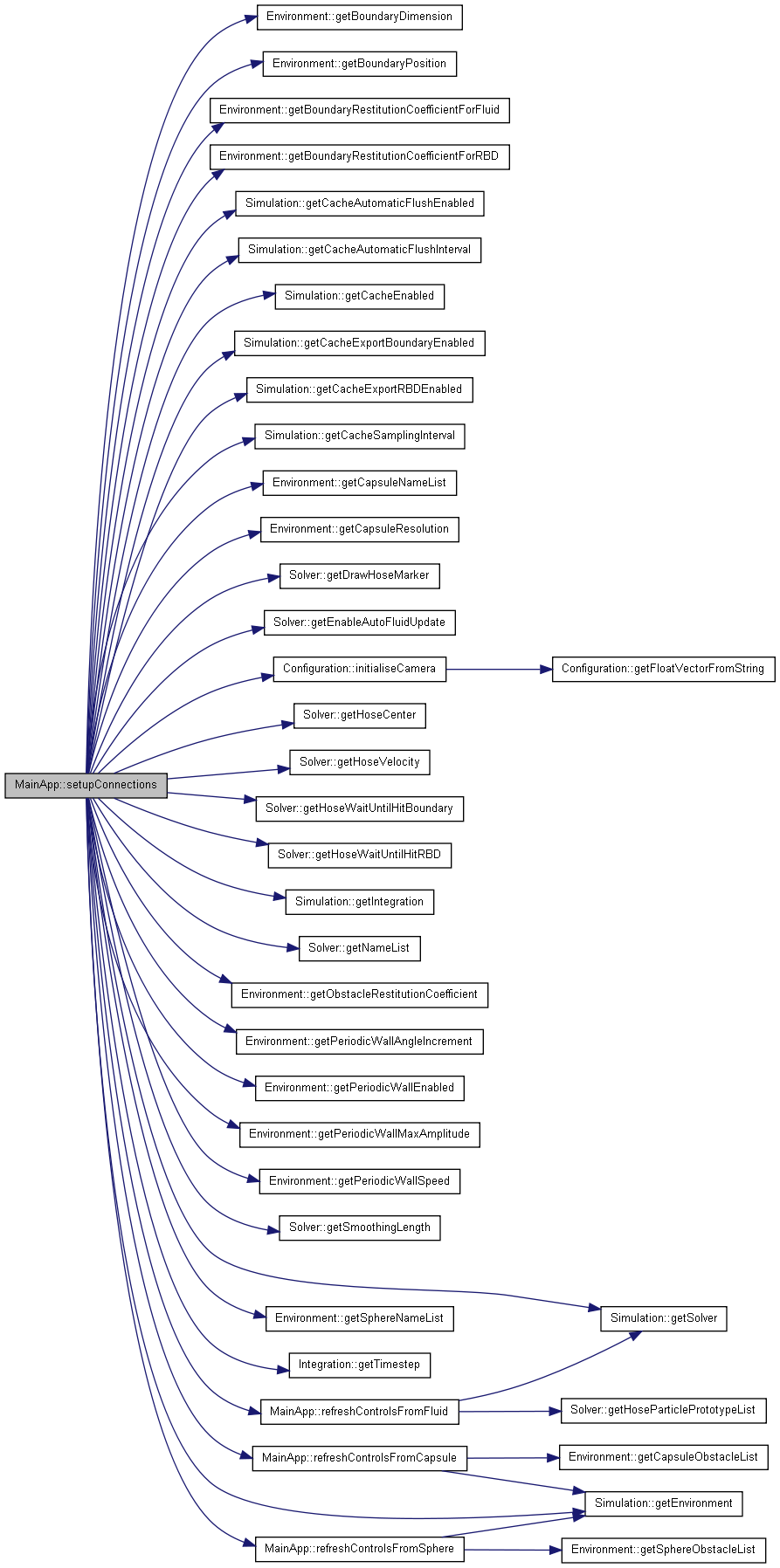
| void MainApp::setupConnections | ( | ) | [private] |
setup up the UI intial values and connects signals/slots
build fluid name list
Definition at line 36 of file MainApp.cpp.
References Environment::getBoundaryDimension(), Environment::getBoundaryPosition(), Environment::getBoundaryRestitutionCoefficientForFluid(), Environment::getBoundaryRestitutionCoefficientForRBD(), Simulation::getCacheAutomaticFlushEnabled(), Simulation::getCacheAutomaticFlushInterval(), Simulation::getCacheEnabled(), Simulation::getCacheExportBoundaryEnabled(), Simulation::getCacheExportRBDEnabled(), Simulation::getCacheSamplingInterval(), Environment::getCapsuleNameList(), Environment::getCapsuleResolution(), Solver::getDrawHoseMarker(), Solver::getEnableAutoFluidUpdate(), Simulation::getEnvironment(), Solver::getHoseCenter(), Solver::getHoseVelocity(), Solver::getHoseWaitUntilHitBoundary(), Solver::getHoseWaitUntilHitRBD(), Simulation::getIntegration(), Solver::getNameList(), Environment::getObstacleRestitutionCoefficient(), Environment::getPeriodicWallAngleIncrement(), Environment::getPeriodicWallEnabled(), Environment::getPeriodicWallMaxAmplitude(), Environment::getPeriodicWallSpeed(), Solver::getSmoothingLength(), Simulation::getSolver(), Environment::getSphereNameList(), Integration::getTimestep(), Configuration::initialiseCamera(), m_simulation, m_ui, refreshControlsFromCapsule(), refreshControlsFromFluid(), and refreshControlsFromSphere().
{
//read from simulation objects and initialise states of controls
//---------------------------------------------------------------------------------------------------------------------
//TAB : SOLVER
//timestep
m_ui->spin_solver_timestep->setValue(m_simulation->getIntegration()->getTimestep());
//smoothing length
m_ui->spin_solver_smoothingLength->setValue(m_simulation->getSolver()->getSmoothingLength());
//---------------------------------------------------------------------------------------------------------------------
//TAB : FLUID
for (int i = 0; i < m_simulation->getSolver()->getNameList().size(); ++i)
{
m_ui->cmb_fluid_currentFluid->addItems(QStringList(QString(m_simulation->getSolver()->getNameList()[i].c_str())));
}
//update controls for the first fluid
if (m_simulation->getSolver()->getNameList().size() >= 1) refreshControlsFromFluid(0);
//toggle hose marker drawing
m_ui->chk_fluid_hose_drawMarker->setChecked(m_simulation->getSolver()->getDrawHoseMarker());
//hose centre
m_ui->spin_hose_centre_x->setValue(m_simulation->getSolver()->getHoseCenter().m_x);
m_ui->spin_hose_centre_y->setValue(m_simulation->getSolver()->getHoseCenter().m_y);
m_ui->spin_hose_centre_z->setValue(m_simulation->getSolver()->getHoseCenter().m_z);
//hose velocity
m_ui->spin_hose_velocity_x->setValue(m_simulation->getSolver()->getHoseVelocity().m_x);
m_ui->spin_hose_velocity_y->setValue(m_simulation->getSolver()->getHoseVelocity().m_y);
m_ui->spin_hose_velocity_z->setValue(m_simulation->getSolver()->getHoseVelocity().m_z);
//wait until first time properties
m_ui->chk_fluid_hose_waitUntilBoundary->setChecked(m_simulation->getSolver()->getHoseWaitUntilHitBoundary());
m_ui->chk_fluid_hose_waitUntilRBD->setChecked(m_simulation->getSolver()->getHoseWaitUntilHitRBD());
//---------------------------------------------------------------------------------------------------------------------
//TAB : CACHE
//cache toggle
m_ui->chk_cache_enable->setChecked(m_simulation->getCacheEnabled());
//cache sampling interval
m_ui->spin_cache_samplingInterval->setValue(m_simulation->getCacheSamplingInterval());
//cache automatic sampling
m_ui->chk_cache_automaticFlush->setChecked(m_simulation->getCacheAutomaticFlushEnabled());
m_ui->spin_cache_automaticFlushInterval->setValue(m_simulation->getCacheAutomaticFlushInterval() / 1000); //ms -> s
//cache rbd and boundary
m_ui->chk_cache_exportRBD->setChecked(m_simulation->getCacheExportRBDEnabled());
m_ui->chk_cache_exportBoundary->setChecked(m_simulation->getCacheExportBoundaryEnabled());
//---------------------------------------------------------------------------------------------------------------------
//TAB : ENVIRONMENT
//SUBTAB : BOUNDARY
//boundary centre
m_ui->spin_environment_boundary_centre_x->setValue(m_simulation->getEnvironment()->getBoundaryPosition().m_x);
m_ui->spin_environment_boundary_centre_y->setValue(m_simulation->getEnvironment()->getBoundaryPosition().m_y);
m_ui->spin_environment_boundary_centre_z->setValue(m_simulation->getEnvironment()->getBoundaryPosition().m_z);
//boundary dimension
m_ui->spin_environment_boundary_size_x->setValue(m_simulation->getEnvironment()->getBoundaryDimension().m_x);
m_ui->spin_environment_boundary_size_y->setValue(m_simulation->getEnvironment()->getBoundaryDimension().m_x);
m_ui->spin_environment_boundary_size_z->setValue(m_simulation->getEnvironment()->getBoundaryDimension().m_x);
//restitution coefficients
m_ui->spin_environment_boundary_restitutionForFluid->setValue(m_simulation->getEnvironment()->getBoundaryRestitutionCoefficientForFluid());
m_ui->spin_environment_boundary_restitutionForRBD->setValue(m_simulation->getEnvironment()->getBoundaryRestitutionCoefficientForRBD());
//periodic wall
m_ui->chk_environment_boundary_enablePeriodicWall->setChecked(m_simulation->getEnvironment()->getPeriodicWallEnabled());
m_ui->spin_environment_boundary_periodicWall_speed->setValue(m_simulation->getEnvironment()->getPeriodicWallSpeed());
m_ui->spin_environment_boundary_periodicWall_angleIncrement->setValue(m_simulation->getEnvironment()->getPeriodicWallAngleIncrement());
m_ui->spin_environment_boundary_periodicWall_maxAmplitude->setValue(m_simulation->getEnvironment()->getPeriodicWallMaxAmplitude());
//SUBTAB : RBD
//restitution coefficients
m_ui->spin_environment_rbd_restitution->setValue(m_simulation->getEnvironment()->getObstacleRestitutionCoefficient());
//capsule resolution
m_ui->spin_environment_capsule_resolution->setValue(m_simulation->getEnvironment()->getCapsuleResolution());
//build sphere combo list
for (int i = 0; i < m_simulation->getEnvironment()->getSphereNameList().size(); ++i)
{
m_ui->cmb_environment_sphere->addItems(QStringList(QString(m_simulation->getEnvironment()->getSphereNameList()[i].c_str())));
}
//update controls for the first sphere
if (m_simulation->getEnvironment()->getSphereNameList().size() >= 1) refreshControlsFromSphere(0);
//build sphere combo list
for (int i = 0; i < m_simulation->getEnvironment()->getCapsuleNameList().size(); ++i)
{
m_ui->cmb_environment_capsule->addItems(QStringList(QString(m_simulation->getEnvironment()->getCapsuleNameList()[i].c_str())));
}
//update controls for the first capsule
if (m_simulation->getEnvironment()->getCapsuleNameList().size() >= 1) refreshControlsFromCapsule(0);
//OUTSIDE BUTTONS
m_ui->cmd_autoMove->setText(m_simulation->getSolver()->getEnableAutoFluidUpdate() ? "AutoMove Stop" : "AutoMove Start");
//GLOBAL CAMERA
//setup camera zoom control and signal here
//read camera z value from config file and set it to the slider
ngl::Camera m_camera = Configuration::initialiseCamera(1.0);
m_ui->sld_cameraZoom->setValue(-m_camera.getEye().m_z);
connect(m_ui->sld_cameraZoom, SIGNAL(valueChanged(int)), m_simulation, SLOT(updateCameraZoom(int)));
}
Simulation* MainApp::m_simulation [private] |
Ui::MainWindow* MainApp::m_ui [private] |
 1.7.4
1.7.4 
