|
Lagrangian Liquid Simulation
Master Thesis project on simulation of liquids using Lagrangian approach and SPH
|
|
Lagrangian Liquid Simulation
Master Thesis project on simulation of liquids using Lagrangian approach and SPH
|
creates fluid particles and perform SPH fluid simulation at every iteration More...
#include <Solver.h>

Public Member Functions | |
| Solver () | |
| ctor | |
| ~Solver () | |
| dtor | |
| void | updateFluid (Environment *io_environment, Integration *_integration) |
| update the fluid state at each timestep interval | |
| void | initialiseDrawing () |
| initialise opengl drawing | |
| void | render (ngl::TransformStack _txStack, ShaderLibrary *io_sman, const std::string _shader) |
| display the particle spheres | |
| void | injectParticles () |
| inject/pumps in hose particles into the simulation | |
| std::vector< std::vector < ngl::Vector > > | getPositionList () |
| return a 2d list of the position of particles, used for caching | |
| std::vector< std::string > | getNameList () |
| return the list of fluid names, used for caching | |
| void | toggleNextHoseableFluid () |
| toggle between the fluids to determine which one will be used by the hose | |
| void | setCurrentHoseableFluid (const int _v) |
| set the current hoseable fluid id | |
| bool | getEnableAutoFluidUpdate () const |
| returns wherether automatic fluid update is enabled | |
| void | toggleEnableAutoFluidUpdate () |
| toggles the state of the automatic fluid update flag | |
| ngl::Real | getSmoothingLength () const |
| return the smoothing length of the neighbour search | |
| bool | getDrawHoseMarker () const |
| return the flag of whether to draw hose marker | |
| ngl::Vector | getHoseCenter () const |
| return the centre of the hose | |
| ngl::Vector | getHoseVelocity () const |
| return the velocity of the hose | |
| bool | getHoseWaitUntilHitBoundary () const |
| return whether the hose particles wait until they first hit the boundary before they act as fluid | |
| bool | getHoseWaitUntilHitRBD () const |
| toggles whether the hose particles wait until they first hit RBDs before they act as fluid | |
| void | setHoseWaitUntilHitBoundary (const bool _v) |
| set whether the hose particles wait until they first hit the boundary before they act as fluid | |
| void | setHoseWaitUntilHitRBD (const bool _v) |
| set whether the hose particles wait until they first hit RBDs before they act as fluid | |
| void | setDrawHoseMarker (const bool _v) |
| set flag of whether to draw hose marker | |
| void | setHoseCenter (const ngl::Vector _v) |
| set the centre of the hose | |
| void | setHoseVelocity (const ngl::Vector _v) |
| return the velocity of the hose | |
| void | setSmoothingLength (const ngl::Real _v) |
| set the smoothing kernel length | |
| std::vector< FluidParticle > | getHoseParticlePrototypeList () const |
| return the list of fluid prototypes | |
| void | updateRestDensityForFluid (const int _fluidId, const ngl::Real _restDensity) |
| update rest density of a fluid | |
| void | updateGasConstantForFluid (const int _fluidId, const ngl::Real _gasConstant) |
| update gas constant of a fluid | |
| void | updateViscosityConstantForFluid (const int _fluidId, const ngl::Real _viscosityConstant) |
| update viscosity constant of a fluid | |
| void | updateSurfaceCoefficientForFluid (const int _fluidId, const ngl::Real _coefficient) |
| update surface coefficient of a fluid | |
| void | updateSurfaceThresholdForFluid (const int _fluidId, const ngl::Real _threshold) |
| update surface threshold of a fluid | |
| void | updateInterfaceCoefficientForFluid (const int _fluidId, const ngl::Real _coefficient) |
| update interface coefficient of a fluid | |
| void | updateInterfaceThresholdForFluid (const int _fluidId, const ngl::Real _threshold) |
| update interface threshold of a fluid | |
| void | updateInterfaceColorForFluid (const int _fluidId, const ngl::Real _color) |
| update interface color of a fluid | |
Private Member Functions | |
| ngl::Real | WKernel_Poly (const ngl::Real _separationLength) |
| calculate the poly 6 kernel | |
| ngl::Vector | WKernel_Poly_Gradient (const ngl::Vector _separationVector) |
| calculate the poly 6 gradient kernel | |
| ngl::Real | WKernel_Poly_Laplacian (const ngl::Real _separationLength) |
| calculate the poly 6 laplacian kernel | |
| ngl::Vector | WKernel_Pressure_Gradient (const ngl::Vector _separationVector) |
| calculate the pressure (spiky) gradient kernel | |
| ngl::Real | WKernel_Viscosity_Laplacian (const ngl::Real _separationLength) |
| calculate the viscosity laplacian kernel | |
| ngl::Vector | normalise (const ngl::Vector _vector) |
| normalise a vector | |
| int | getFluidIdFromName (const std::string _name) |
| get a particle fluid id from its name | |
Private Attributes | |
| std::vector< FluidParticle > | m_particleList |
| list of particles making up the fluid simulation | |
| std::vector< ParticleVector > | m_neighbourForParticleList |
| the big list of neighbours of each particle | |
| ngl::Real | m_smoothingLength |
| smoothing kernel length | |
| bool | m_enableAutoFluid |
| flag to control automatic movement of the fluid | |
| Neighbour * | m_neighbour |
| the neighbouring structure for the fluid particles | |
| ngl::Real | m_weightPoly |
| pre-calculated part of the poly 6 kernel | |
| ngl::Real | m_weightPolyGradient |
| pre-calculated part of the poly 6 gradient kernel | |
| ngl::Real | m_weightPolyLaplacian |
| pre-calculated part of the poly 6 laplacian kernel | |
| ngl::Real | m_weightPressureGradient |
| pre-calculated part of the pressure gradient kernel | |
| ngl::Real | m_weightViscosityLaplacian |
| pre-calculated part of the viscosity laplacian kernel | |
| std::vector< FluidParticle > | m_hoseParticlePrototypeList |
| list of particles, one per fluid that is used as a prototype when creating a hose | |
| std::vector< FluidParticle > | m_hoseParticleList |
| list of particles making up the hose model | |
| int | m_currentHoseableFluid |
| the current fluid id that is injected when hose is applied | |
| ngl::Vector | m_hoseInitialCenter |
| the initial position of the hose particles | |
| ngl::Vector | m_hoseCenter |
| the current position where hose particles are injected into the scene | |
| ngl::Vector | m_hoseVelocity |
| the velocity of hose particles | |
| bool | m_drawHoseMarker |
| toggles whether to draw hose marker | |
| bool | m_hoseWaitUntilHitBoundary |
| toggles whether the hose particles wait until they first hit the boundary before they act as fluid | |
| bool | m_hoseWaitUntilHitRBD |
| toggles whether the hose particles wait until they first hit RBDs before they act as fluid | |
| int | m_iteration |
| iteration counter | |
creates fluid particles and perform SPH fluid simulation at every iteration
| Solver::Solver | ( | ) |
ctor
Definition at line 12 of file Solver.cpp.
References Configuration::initialiseFluidSolver(), m_currentHoseableFluid, m_drawHoseMarker, m_enableAutoFluid, m_hoseCenter, m_hoseParticleList, m_hoseParticlePrototypeList, m_hoseVelocity, m_hoseWaitUntilHitBoundary, m_hoseWaitUntilHitRBD, m_iteration, m_neighbour, m_particleList, m_smoothingLength, m_weightPoly, m_weightPolyGradient, m_weightPolyLaplacian, m_weightPressureGradient, and m_weightViscosityLaplacian.
{
//create particles and initialise parameters
Configuration::initialiseFluidSolver
(
m_smoothingLength,
m_particleList,
m_hoseParticlePrototypeList,
m_hoseParticleList,
m_hoseCenter,
m_hoseVelocity,
m_drawHoseMarker,
m_hoseWaitUntilHitBoundary,
m_hoseWaitUntilHitRBD
);
//precompute kernel weight multipliers
m_weightPoly = (315.0 / (64.0 * ngl::PI * pow(m_smoothingLength, 9)));
m_weightPolyGradient = (-945.0 / (32.0 * ngl::PI * pow(m_smoothingLength, 9)));
m_weightPolyLaplacian = (-945.0 / (32.0 * ngl::PI * pow(m_smoothingLength, 9)));
m_weightPressureGradient = (-45.0 / (ngl::PI * pow(m_smoothingLength, 6)));
m_weightViscosityLaplacian = (45.0 / (ngl::PI * pow(m_smoothingLength, 6)));
//initialise parameters
m_enableAutoFluid = true;
m_currentHoseableFluid = 0;
//create neighbouring structure
m_neighbour = new Neighbour(m_particleList.size(), m_smoothingLength);
m_iteration = 0;
}

| Solver::~Solver | ( | ) |
dtor
Definition at line 45 of file Solver.cpp.
References m_neighbour.
{
//clean up
std::cout << "Fluid Solver Cleanup" << std::endl;
//delete objects
delete m_neighbour;
}
| bool Solver::getDrawHoseMarker | ( | ) | const [inline] |
return the flag of whether to draw hose marker
Definition at line 89 of file Solver.h.
References m_drawHoseMarker.
{ return m_drawHoseMarker; }

| bool Solver::getEnableAutoFluidUpdate | ( | ) | const [inline] |
returns wherether automatic fluid update is enabled
Definition at line 80 of file Solver.h.
References m_enableAutoFluid.
{ return m_enableAutoFluid; }

| int Solver::getFluidIdFromName | ( | const std::string | _name | ) | [private] |
get a particle fluid id from its name
| [in] | _name | the fluid name |
Definition at line 112 of file Solver.cpp.
References m_hoseParticlePrototypeList.
{
//assume id to be of the first fluid
int id = 0;
//loop through hose prototype list
for (int i = 0; i < m_hoseParticlePrototypeList.size(); i++)
{
//compare names
if (m_hoseParticlePrototypeList[i].getName() == _name)
{
id = i;
break;
}
}
return id;
}
| ngl::Vector Solver::getHoseCenter | ( | ) | const [inline] |
return the centre of the hose
Definition at line 92 of file Solver.h.
References m_hoseCenter.
{ return m_hoseCenter; }
| std::vector<FluidParticle> Solver::getHoseParticlePrototypeList | ( | ) | const [inline] |
return the list of fluid prototypes
Definition at line 132 of file Solver.h.
References m_hoseParticlePrototypeList.
{ return m_hoseParticlePrototypeList; }

| ngl::Vector Solver::getHoseVelocity | ( | ) | const [inline] |
return the velocity of the hose
Definition at line 95 of file Solver.h.
References m_hoseVelocity.
{ return m_hoseVelocity; }
| bool Solver::getHoseWaitUntilHitBoundary | ( | ) | const [inline] |
return whether the hose particles wait until they first hit the boundary before they act as fluid
Definition at line 98 of file Solver.h.
References m_hoseWaitUntilHitBoundary.
{ return m_hoseWaitUntilHitBoundary; }

| bool Solver::getHoseWaitUntilHitRBD | ( | ) | const [inline] |
toggles whether the hose particles wait until they first hit RBDs before they act as fluid
Definition at line 101 of file Solver.h.
References m_hoseWaitUntilHitRBD.
{ return m_hoseWaitUntilHitRBD; }

| std::vector< std::string > Solver::getNameList | ( | ) |
return the list of fluid names, used for caching
Definition at line 434 of file Solver.cpp.
References m_hoseParticlePrototypeList.
{
std::vector<std::string> list;
list.reserve(m_hoseParticlePrototypeList.size());
for (int i = 0; i < m_hoseParticlePrototypeList.size(); ++i) list.push_back(m_hoseParticlePrototypeList[i].getName());
return list;
}

| std::vector< std::vector< ngl::Vector > > Solver::getPositionList | ( | ) |
return a 2d list of the position of particles, used for caching
Definition at line 404 of file Solver.cpp.
References m_hoseParticlePrototypeList, and m_particleList.
{
std::vector<std::vector<ngl::Vector> > positionList;
//loop through the prototype list that contains 1 particle prototype for each fluid
for (int i = 0; i < m_hoseParticlePrototypeList.size(); ++i)
{
//get name
std::string name = m_hoseParticlePrototypeList[i].getName();
std::vector<ngl::Vector> list;
list.reserve(m_particleList.size());
//loop through particle list
for (int j = 0; j < m_particleList.size(); ++j)
{
//search for particles having this name
if (m_particleList[j].getName() == name)
{
//add this particle's position to list
list.push_back(m_particleList[j].getPosition());
}
}
//add this fluid's position list to the big list
positionList.push_back(list);
}
return positionList;
}

| ngl::Real Solver::getSmoothingLength | ( | ) | const [inline] |
return the smoothing length of the neighbour search
Definition at line 86 of file Solver.h.
References m_smoothingLength.
{ return m_smoothingLength; }

| void Solver::initialiseDrawing | ( | ) |
initialise opengl drawing
Definition at line 54 of file Solver.cpp.
{
ngl::VBOPrimitives* prim = ngl::VBOPrimitives::instance();
//create vbo for particle sphere
prim->createVBOSphere("particleSphere", 0.17, 10);
}

| void Solver::injectParticles | ( | ) |
inject/pumps in hose particles into the simulation
Definition at line 131 of file Solver.cpp.
References m_currentHoseableFluid, m_hoseCenter, m_hoseInitialCenter, m_hoseParticleList, m_hoseParticlePrototypeList, m_hoseVelocity, m_hoseWaitUntilHitBoundary, m_hoseWaitUntilHitRBD, m_neighbour, m_particleList, m_smoothingLength, Neighbour::reInitialise(), Configuration::s_nextParticleId, Particle::setId(), Particle::setPosition(), Particle::setVelocity(), FluidParticle::setWaitUntilFirstHitBoundary(), and FluidParticle::setWaitUntilFirstHitRBD().
{
std::vector<FluidParticle> l;
//get translate in hose center
ngl::Vector translatedVector = m_hoseCenter - m_hoseInitialCenter;
//get prototype particle from hose prototype list
FluidParticle prototypeParticle = m_hoseParticlePrototypeList[m_currentHoseableFluid];
//loop through hose particles and add particles to solver particle list
for (int i = 0; i < m_hoseParticleList.size(); i++)
{
//create particle from prototype particle
FluidParticle p(prototypeParticle);
//set id of new particle
p.setId(Configuration::s_nextParticleId++);
//set position of new particle = hose particle(i) + translatedVector
p.setPosition(m_hoseParticleList[i].getPosition() + translatedVector);
//set velocity of new particle
p.setVelocity(m_hoseVelocity);
//set wait until first hit properties
p.setWaitUntilFirstHitBoundary(m_hoseWaitUntilHitBoundary);
p.setWaitUntilFirstHitRBD(m_hoseWaitUntilHitRBD);
//add new particle to particle list
m_particleList.push_back(p);
}
std::cout << "Hose for fluid : " << m_currentHoseableFluid << "\tnew particle count : " << m_particleList.size() << "\n";
//reinitialise neighbour structure due to new particles being added
m_neighbour->reInitialise(m_particleList.size(), m_smoothingLength);
}

| ngl::Vector Solver::normalise | ( | const ngl::Vector | _vector | ) | [private] |
normalise a vector
| [in] | _vector | the vector to normalise |
Definition at line 103 of file Solver.cpp.
{
ngl::Vector v = _vector;
if (_vector.length() > 0.0001f) v.normalize();
return v;
}

| void Solver::render | ( | ngl::TransformStack | _txStack, |
| ShaderLibrary * | io_sman, | ||
| const std::string | _shader | ||
| ) |
display the particle spheres
| [in] | _txStack | the transformation stack used to maintain opengl states |
| [in,out] | io_sman | the shader library |
| [in] | _shader | the shader used to display the spheres |
Definition at line 378 of file Solver.cpp.
References ShaderLibrary::updateColor(), and ShaderLibrary::updateModel().
{
ngl::VBOPrimitives* prim = ngl::VBOPrimitives::instance();
_txStack.pushTransform();
{
for (int i = 0; i < m_particleList.size(); ++i)
{
_txStack.getCurrentTransform().setPosition(m_particleList[i].getPosition().m_x, m_particleList[i].getPosition().m_y, m_particleList[i].getPosition().m_z);
//pass vertex info to shader
io_sman->updateModel(_shader, _txStack.getCurrAndGlobal().getMatrix(), false);
//pass color info to shader
io_sman->updateColor(_shader, m_particleList[i].getColour(), false);
prim->draw("particleSphere");
}
}
_txStack.popTransform();
}

| void Solver::setCurrentHoseableFluid | ( | const int | _v | ) | [inline] |
set the current hoseable fluid id
| [in] | _v | the fluid id |
Definition at line 77 of file Solver.h.
References m_currentHoseableFluid.
{ m_currentHoseableFluid = _v; }

| void Solver::setDrawHoseMarker | ( | const bool | _v | ) | [inline] |
set flag of whether to draw hose marker
| [in] | _v | the new value |
Definition at line 113 of file Solver.h.
References m_drawHoseMarker.
{ m_drawHoseMarker = _v; }

| void Solver::setHoseCenter | ( | const ngl::Vector | _v | ) | [inline] |
set the centre of the hose
| [in] | _v | the new value |
Definition at line 117 of file Solver.h.
References m_hoseCenter.
{ m_hoseCenter = _v; }
| void Solver::setHoseVelocity | ( | const ngl::Vector | _v | ) | [inline] |
return the velocity of the hose
| [in] | _v | the new value |
Definition at line 121 of file Solver.h.
References m_hoseVelocity.
{ m_hoseVelocity = _v; }
| void Solver::setHoseWaitUntilHitBoundary | ( | const bool | _v | ) | [inline] |
set whether the hose particles wait until they first hit the boundary before they act as fluid
| [in] | _v | the new flag |
Definition at line 105 of file Solver.h.
References m_hoseWaitUntilHitBoundary.
{ m_hoseWaitUntilHitBoundary = _v; }

| void Solver::setHoseWaitUntilHitRBD | ( | const bool | _v | ) | [inline] |
set whether the hose particles wait until they first hit RBDs before they act as fluid
| [in] | _v | the new flag |
Definition at line 109 of file Solver.h.
References m_hoseWaitUntilHitRBD.
{ m_hoseWaitUntilHitRBD = _v; }

| void Solver::setSmoothingLength | ( | const ngl::Real | _v | ) | [inline] |
set the smoothing kernel length
| [in] | _v | updated smoothing length |
Definition at line 125 of file Solver.h.
References m_neighbour, m_smoothingLength, and Neighbour::setCellSize().
{
m_smoothingLength = _v;
m_neighbour->setCellSize(_v);
}


| void Solver::toggleEnableAutoFluidUpdate | ( | ) | [inline] |
toggles the state of the automatic fluid update flag
Definition at line 83 of file Solver.h.
References m_enableAutoFluid.
{ m_enableAutoFluid ^= true; }

| void Solver::toggleNextHoseableFluid | ( | ) | [inline] |
toggle between the fluids to determine which one will be used by the hose
Definition at line 69 of file Solver.h.
References m_currentHoseableFluid, and m_hoseParticlePrototypeList.
{
m_currentHoseableFluid = ++m_currentHoseableFluid % m_hoseParticlePrototypeList.size();
std::cout << "New Hoseable Fluid Id : " << m_currentHoseableFluid << "\n";
}

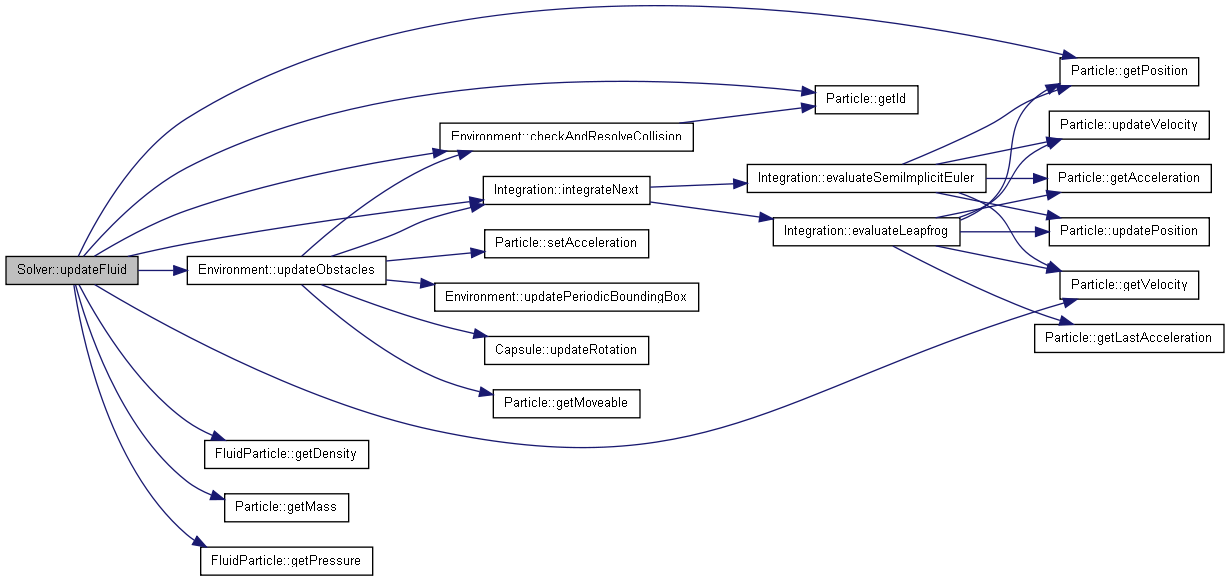
| void Solver::updateFluid | ( | Environment * | io_environment, |
| Integration * | _integration | ||
| ) |
update the fluid state at each timestep interval
| [in,out] | io_environment | the environment that holds the list of obstacles |
| [in] | _integration | the integration object for the simulation |
Definition at line 171 of file Solver.cpp.
References Environment::checkAndResolveCollision(), FluidParticle::getDensity(), Particle::getId(), Particle::getMass(), Particle::getPosition(), FluidParticle::getPressure(), Particle::getVelocity(), Integration::integrateNext(), Configuration::s_accelerationOfFreeFall, and Environment::updateObstacles().
{
//clear neighbour map
m_neighbour->clearHashmap();
#pragma omp parallel
{
//refresh neighbour list
m_neighbour->refreshHashmap(m_particleList);
}
#pragma omp parallel
{
#pragma omp for schedule(dynamic, 50)
//density-pressure calculations
for (int i = 0; i < m_particleList.size(); ++i)
{
//get neighbours of current particle
std::vector<FluidParticle> neighbourList = m_neighbour->determineNeighbours(m_particleList[i].getPosition());
//calculate density and pressure
ngl::Real density = 0.0;
for (int j = 0; j < neighbourList.size(); j++)
{
//accumulate density
density += neighbourList[j].getMass() * WKernel_Poly((m_particleList[i].getPosition() - neighbourList[j].getPosition()).length());
}
m_particleList[i].setDensity(density);
//calculate pressure
m_particleList[i].calculatePressure();
}
#pragma omp for schedule(dynamic, 50)
//force calculations
for (int i = 0; i < m_particleList.size(); ++i)
{
//reset net forces accumulate
m_particleList[i].resetForce();
//get neighbours of current particle
std::vector<FluidParticle> neighbourList = m_neighbour->determineNeighbours(m_particleList[i].getPosition());
//calculate internal forces of current particle
ngl::Real massPerDensity = 0;
ngl::Vector separationVector = 0;
ngl::Real separationLength = 0.0;
ngl::Vector pressure = 0;
ngl::Vector viscosity = 0;
ngl::Vector surfaceGradient = 0;
ngl::Real surfaceLaplacian = 0;
ngl::Vector surfaceTensionGradient = 0;
ngl::Real surfaceTensionLaplacian = 0;
ngl::Vector interfaceTensionGradient = 0;
ngl::Real interfaceTensionLaplacian = 0;
//apply fluid rules if enabled
if (m_particleList[i].fluidRulesEnabled())
{
for (int j = 0; j < neighbourList.size(); j++)
{
//get neighbour
FluidParticle neighbour = neighbourList[j];
//pre-calculate some repetitive values
massPerDensity = neighbour.getMass() / neighbour.getDensity();
separationVector = m_particleList[i].getPosition() - neighbour.getPosition();
separationLength = separationVector.length();
//add in pressure and viscosity force only for neighbours, not the current particle itself
if (neighbour.getId() != m_particleList[i].getId())
{
//accumulate pressure force component
pressure = pressure +
(
((m_particleList[i].getPressure() / pow(m_particleList[i].getDensity(), 2)) + (neighbour.getPressure() / pow(neighbour.getDensity(), 2))) *
neighbour.getMass() *
WKernel_Pressure_Gradient(separationVector)
);
//accumulate viscous force component
viscosity = viscosity +
(
/*((currentParticle.getViscosityConstant() + neighbour.getViscosityConstant()) / 2.0) **/
massPerDensity *
(neighbour.getVelocity() - m_particleList[i].getVelocity()) *
WKernel_Viscosity_Laplacian(separationLength)
);
}
//accumulate surface tension-interface force component
surfaceGradient = WKernel_Poly_Gradient(separationVector);
surfaceLaplacian = WKernel_Poly_Laplacian(separationLength);
//accumulate surface gradient
surfaceTensionGradient = surfaceTensionGradient +
(
massPerDensity *
m_particleList[i].getSurfaceColorCoefficient() *
surfaceGradient
);
//accumulate surface laplacian
surfaceTensionLaplacian = surfaceTensionLaplacian +
(
massPerDensity *
m_particleList[i].getSurfaceColorCoefficient() *
surfaceLaplacian
);
//accumulate interface gradient
interfaceTensionGradient = surfaceTensionGradient +
(
massPerDensity *
m_particleList[i].getInterfaceColorCoefficient() *
surfaceGradient
);
//accumulate interface laplacian
interfaceTensionLaplacian = surfaceTensionLaplacian +
(
massPerDensity *
m_particleList[i].getInterfaceColorCoefficient() *
surfaceLaplacian
);
}
}
//calculate pressure force
m_particleList[i].setPressureForce(-1.0 * m_particleList[i].getDensity() * pressure);
//calculate viscosity force
m_particleList[i].setViscosityForce(viscosity * m_particleList[i].getViscosityConstant());
//calculate surface tension force
m_particleList[i].setSurfaceTensionForce(0.0);
if (surfaceTensionGradient.length() > m_particleList[i].getSurfaceTensionThreshold())
{
m_particleList[i].setSurfaceTensionForce(-1.0 * m_particleList[i].getSurfaceTensionCoefficient() * normalise(surfaceTensionGradient) * surfaceTensionLaplacian);
}
//calculate interface tension force
m_particleList[i].setInterfaceTensionForce(0.0);
if (interfaceTensionGradient.length() > m_particleList[i].getInterfaceTensionThreshold())
{
m_particleList[i].setInterfaceTensionForce(-1.0 * m_particleList[i].getInterfaceTensionCoefficient() * normalise(interfaceTensionGradient) * interfaceTensionLaplacian);
}
//calculate gravity force (=density * g)
m_particleList[i].setGravityForce(new ngl::Vector(0, m_particleList[i].getDensity() * Configuration::s_accelerationOfFreeFall, 0));
//calculate acceleration (= force / mass)
m_particleList[i].accumulateNetForce(m_particleList[i].getPressureForce());
m_particleList[i].accumulateNetForce(m_particleList[i].getViscosityForce());
m_particleList[i].accumulateNetForce(m_particleList[i].getSurfaceTensionForce());
m_particleList[i].accumulateNetForce(m_particleList[i].getInterfaceTensionForce());
m_particleList[i].accumulateNetForce(m_particleList[i].getGravityForce());
m_particleList[i].updateAcceleration(m_particleList[i].getNetForce() / m_particleList[i].getDensity());
}
#pragma omp for schedule(dynamic, 50)
//fluid integration and movement
for (int i = 0; i < m_particleList.size(); ++i)
{
if (m_particleList[i].getMoveable())
{
//determine next (position, velocity) of particle
_integration->integrateNext(m_particleList[i]);
}
}
#pragma omp single
//obstacles movement
io_environment->updateObstacles(_integration);
#pragma omp for schedule(dynamic, 50)
//collision check and resolution for fluid particles
for (int i = 0; i < m_particleList.size(); ++i)
{
//check and resolve collision against obstacles and boundary
bool hitBoundary = false; bool hitRBD = false;
io_environment->checkAndResolveCollision(m_particleList[i], hitBoundary, hitRBD, false);
//update first time hit issues
m_particleList[i].updateHitForTheFirstTime(hitBoundary, hitRBD);
}
}
// //increment iteration counter
// iteration++;
// std::cout << iteration << "\n";
// if ((iteration % 1001) == 0)
// {
// time_t now; time(&now);
// printf("%s\n", ctime(&now));
// }
}
| void Solver::updateGasConstantForFluid | ( | const int | _fluidId, |
| const ngl::Real | _gasConstant | ||
| ) |
update gas constant of a fluid
| [in] | _fluidId | the fluid to update |
| [in] | _gasConstant | the new gas constant |
Definition at line 464 of file Solver.cpp.
{
//loop for particles of the concerned fluid
for (int i = 0; i < m_particleList.size(); ++i)
{
if (getFluidIdFromName(m_particleList[i].getName()) == _fluidId)
{
//found particles of the concerned fluid -> update it
m_particleList[i].setGasConstant(_gasConstant);
}
}
m_hoseParticlePrototypeList[_fluidId].setGasConstant(_gasConstant);
}

| void Solver::updateInterfaceCoefficientForFluid | ( | const int | _fluidId, |
| const ngl::Real | _coefficient | ||
| ) |
update interface coefficient of a fluid
| [in] | _fluidId | the fluid to update |
| [in] | _coefficient | the new coefficient |
Definition at line 540 of file Solver.cpp.
{
//loop for particles of the concerned fluid
for (int i = 0; i < m_particleList.size(); ++i)
{
if (getFluidIdFromName(m_particleList[i].getName()) == _fluidId)
{
//found particles of the concerned fluid -> update it
m_particleList[i].setInterfaceTensionCoefficient(_coefficient);
}
}
m_hoseParticlePrototypeList[_fluidId].setInterfaceTensionCoefficient(_coefficient);
}

| void Solver::updateInterfaceColorForFluid | ( | const int | _fluidId, |
| const ngl::Real | _color | ||
| ) |
update interface color of a fluid
| [in] | _fluidId | the fluid to update |
| [in] | _color | the new color |
Definition at line 578 of file Solver.cpp.
{
//loop for particles of the concerned fluid
for (int i = 0; i < m_particleList.size(); ++i)
{
if (getFluidIdFromName(m_particleList[i].getName()) == _fluidId)
{
//found particles of the concerned fluid -> update it
m_particleList[i].setInterfaceColorCoefficient(_color);
}
}
m_hoseParticlePrototypeList[_fluidId].setInterfaceColorCoefficient(_color);
}

| void Solver::updateInterfaceThresholdForFluid | ( | const int | _fluidId, |
| const ngl::Real | _threshold | ||
| ) |
update interface threshold of a fluid
| [in] | _fluidId | the fluid to update |
| [in] | _threshold | the new threshold |
Definition at line 559 of file Solver.cpp.
{
//loop for particles of the concerned fluid
for (int i = 0; i < m_particleList.size(); ++i)
{
if (getFluidIdFromName(m_particleList[i].getName()) == _fluidId)
{
//found particles of the concerned fluid -> update it
m_particleList[i].setInterfaceTensionThreshold(_threshold);
}
}
m_hoseParticlePrototypeList[_fluidId].setInterfaceTensionThreshold(_threshold);
}

| void Solver::updateRestDensityForFluid | ( | const int | _fluidId, |
| const ngl::Real | _restDensity | ||
| ) |
update rest density of a fluid
| [in] | _fluidId | the fluid to update |
| [in] | _restDensity | the new density |
Definition at line 445 of file Solver.cpp.
{
//loop for particles of the concerned fluid
for (int i = 0; i < m_particleList.size(); ++i)
{
if (getFluidIdFromName(m_particleList[i].getName()) == _fluidId)
{
//found particles of the concerned fluid -> update it
m_particleList[i].setMaterialRestDensity(_restDensity);
}
}
m_hoseParticlePrototypeList[_fluidId].setMaterialRestDensity(_restDensity);
}

| void Solver::updateSurfaceCoefficientForFluid | ( | const int | _fluidId, |
| const ngl::Real | _coefficient | ||
| ) |
update surface coefficient of a fluid
| [in] | _fluidId | the fluid to update |
| [in] | _coefficient | the new coefficient |
Definition at line 502 of file Solver.cpp.
{
//loop for particles of the concerned fluid
for (int i = 0; i < m_particleList.size(); ++i)
{
if (getFluidIdFromName(m_particleList[i].getName()) == _fluidId)
{
//found particles of the concerned fluid -> update it
m_particleList[i].setSurfaceTensionCoefficient(_coefficient);
}
}
m_hoseParticlePrototypeList[_fluidId].setSurfaceTensionCoefficient(_coefficient);
}

| void Solver::updateSurfaceThresholdForFluid | ( | const int | _fluidId, |
| const ngl::Real | _threshold | ||
| ) |
update surface threshold of a fluid
| [in] | _fluidId | the fluid to update |
| [in] | _threshold | the new threshold |
Definition at line 521 of file Solver.cpp.
{
//loop for particles of the concerned fluid
for (int i = 0; i < m_particleList.size(); ++i)
{
if (getFluidIdFromName(m_particleList[i].getName()) == _fluidId)
{
//found particles of the concerned fluid -> update it
m_particleList[i].setSurfaceTensionThreshold(_threshold);
}
}
m_hoseParticlePrototypeList[_fluidId].setSurfaceTensionThreshold(_threshold);
}

| void Solver::updateViscosityConstantForFluid | ( | const int | _fluidId, |
| const ngl::Real | _viscosityConstant | ||
| ) |
update viscosity constant of a fluid
| [in] | _fluidId | the fluid to update |
| [in] | _viscosityConstant | the new viscosity constant |
Definition at line 483 of file Solver.cpp.
{
//loop for particles of the concerned fluid
for (int i = 0; i < m_particleList.size(); ++i)
{
if (getFluidIdFromName(m_particleList[i].getName()) == _fluidId)
{
//found particles of the concerned fluid -> update it
m_particleList[i].setViscosityConstant(_viscosityConstant);
}
}
m_hoseParticlePrototypeList[_fluidId].setViscosityConstant(_viscosityConstant);
}

| ngl::Real Solver::WKernel_Poly | ( | const ngl::Real | _separationLength | ) | [private] |
calculate the poly 6 kernel
| [in] | _separationLength | the separation distance between a particle and its neighbour |
Definition at line 62 of file Solver.cpp.
References m_smoothingLength, and m_weightPoly.
{
ngl::Real weight = m_weightPoly * (pow(pow(m_smoothingLength, 2) - pow(_separationLength, 2), 3));
return weight;
}
| ngl::Vector Solver::WKernel_Poly_Gradient | ( | const ngl::Vector | _separationVector | ) | [private] |
calculate the poly 6 gradient kernel
| [in] | _separationVector | the separation vector between a particle and its neighbour |
Definition at line 69 of file Solver.cpp.
References m_smoothingLength, and m_weightPolyGradient.
{
ngl::Vector weight = 0;
ngl::Real separationLength = _separationVector.length();
weight = m_weightPolyGradient * _separationVector * pow(pow(m_smoothingLength, 2) - pow(separationLength, 2), 2);
return weight;
}
| ngl::Real Solver::WKernel_Poly_Laplacian | ( | const ngl::Real | _separationLength | ) | [private] |
calculate the poly 6 laplacian kernel
| [in] | _separationLength | the separation distance between a particle and its neighbour |
Definition at line 79 of file Solver.cpp.
References m_smoothingLength, and m_weightPolyLaplacian.
{
ngl::Real weight = m_weightPolyLaplacian * (pow(m_smoothingLength, 2) - pow(_separationLength, 2)) * ((3.0 * pow(m_smoothingLength, 2)) - (7.0 * pow(_separationLength, 2)));
return weight;
}
| ngl::Vector Solver::WKernel_Pressure_Gradient | ( | const ngl::Vector | _separationVector | ) | [private] |
calculate the pressure (spiky) gradient kernel
| [in] | _separationVector | the separation vector between a particle and its neighbour |
Definition at line 86 of file Solver.cpp.
References m_smoothingLength, m_weightPressureGradient, and normalise().
{
ngl::Vector weight = 0;
ngl::Real separationLength = _separationVector.length();
weight = m_weightPressureGradient * pow(m_smoothingLength - separationLength, 2) * normalise(_separationVector);
return weight;
}

| ngl::Real Solver::WKernel_Viscosity_Laplacian | ( | const ngl::Real | _separationLength | ) | [private] |
calculate the viscosity laplacian kernel
| [in] | _separationLength | the separation distance between a particle and its neighbour |
Definition at line 96 of file Solver.cpp.
References m_smoothingLength, and m_weightViscosityLaplacian.
{
ngl::Real weight = m_weightViscosityLaplacian * (m_smoothingLength - _separationLength);
return weight;
}
int Solver::m_currentHoseableFluid [private] |
bool Solver::m_drawHoseMarker [private] |
bool Solver::m_enableAutoFluid [private] |
ngl::Vector Solver::m_hoseCenter [private] |
ngl::Vector Solver::m_hoseInitialCenter [private] |
std::vector<FluidParticle> Solver::m_hoseParticleList [private] |
std::vector<FluidParticle> Solver::m_hoseParticlePrototypeList [private] |
ngl::Vector Solver::m_hoseVelocity [private] |
bool Solver::m_hoseWaitUntilHitBoundary [private] |
bool Solver::m_hoseWaitUntilHitRBD [private] |
int Solver::m_iteration [private] |
Neighbour* Solver::m_neighbour [private] |
std::vector<ParticleVector> Solver::m_neighbourForParticleList [private] |
std::vector<FluidParticle> Solver::m_particleList [private] |
ngl::Real Solver::m_smoothingLength [private] |
ngl::Real Solver::m_weightPoly [private] |
ngl::Real Solver::m_weightPolyGradient [private] |
ngl::Real Solver::m_weightPolyLaplacian [private] |
ngl::Real Solver::m_weightPressureGradient [private] |
ngl::Real Solver::m_weightViscosityLaplacian [private] |
 1.7.4
1.7.4 
