|
Lagrangian Liquid Simulation
Master Thesis project on simulation of liquids using Lagrangian approach and SPH
|
|
Lagrangian Liquid Simulation
Master Thesis project on simulation of liquids using Lagrangian approach and SPH
|
handles integration to find next position and velocity of particles More...
#include <Integration.h>
Public Member Functions | |
| Integration (const IntegrationType _integrationType, const ngl::Real _timestep) | |
| ctor | |
| void | integrateNext (Particle &io_currentParticle) |
| integrate next velocity and position of a particle | |
| IntegrationType | getIntegrationType () const |
| get the integration method | |
| void | setIntegrationType (const IntegrationType _v) |
| sets the integration method | |
| void | setIntegrationType (const int _v) |
| set the integration method of the simulation | |
| ngl::Real | getTimestep () const |
| get the timestep of the simulation | |
| void | setTimestep (const ngl::Real _v) |
| set the timestep of the simulation | |
Private Member Functions | |
| void | evaluateSemiImplicitEuler (Particle &io_currentParticle) |
| integrate a particle using semi implicit euler | |
| void | evaluateLeapfrog (Particle &io_currentParticle) |
| integrate a particle using leapfrog | |
Private Attributes | |
| IntegrationType | m_integrationType |
| integration method | |
| ngl::Real | m_timestep |
| timestep of simulation | |
handles integration to find next position and velocity of particles
Definition at line 23 of file Integration.h.
| Integration::Integration | ( | const IntegrationType | _integrationType, |
| const ngl::Real | _timestep | ||
| ) |
ctor
| [in] | _integrationType | the integration method |
| [in] | _timestep | the timestep of the simulation |
Definition at line 7 of file Integration.cpp.
{
m_integrationType = _integrationType;
m_timestep = _timestep;
}
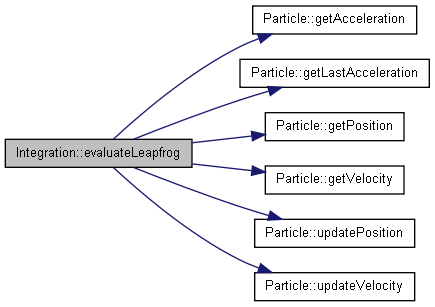
| void Integration::evaluateLeapfrog | ( | Particle & | io_currentParticle | ) | [private] |
integrate a particle using leapfrog
| [in,out] | io_currentParticle | the particle that is being affected |
Definition at line 36 of file Integration.cpp.
References Particle::getAcceleration(), Particle::getLastAcceleration(), Particle::getPosition(), Particle::getVelocity(), m_timestep, Particle::updatePosition(), and Particle::updateVelocity().
{
//modified leapfrog from http://en.wikipedia.org/wiki/Leapfrog_integration
io_currentParticle.updateVelocity(io_currentParticle.getVelocity() + (((io_currentParticle.getLastAcceleration() + io_currentParticle.getAcceleration()) / 2.0) * m_timestep));
io_currentParticle.updatePosition(io_currentParticle.getPosition() + (io_currentParticle.getVelocity() * m_timestep) + ((io_currentParticle.getLastAcceleration() / 2.0) * m_timestep * m_timestep));
}

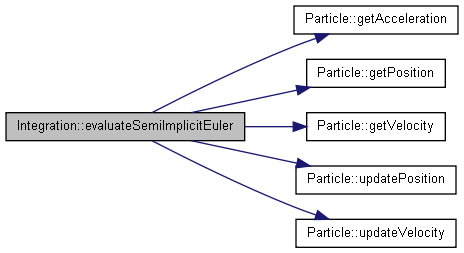
| void Integration::evaluateSemiImplicitEuler | ( | Particle & | io_currentParticle | ) | [private] |
integrate a particle using semi implicit euler
| [in,out] | io_currentParticle | the particle that is being affected |
Definition at line 28 of file Integration.cpp.
References Particle::getAcceleration(), Particle::getPosition(), Particle::getVelocity(), m_timestep, Particle::updatePosition(), and Particle::updateVelocity().
{
//semi implicit euler from http://en.wikipedia.org/wiki/Semi-implicit_Euler
io_currentParticle.updateVelocity(io_currentParticle.getVelocity() + (io_currentParticle.getAcceleration() * m_timestep));
io_currentParticle.updatePosition(io_currentParticle.getPosition() + (io_currentParticle.getVelocity() * m_timestep));
}

| IntegrationType Integration::getIntegrationType | ( | ) | const [inline] |
get the integration method
Definition at line 40 of file Integration.h.
References m_integrationType.
{ return m_integrationType; }
| ngl::Real Integration::getTimestep | ( | ) | const [inline] |
get the timestep of the simulation
Definition at line 51 of file Integration.h.
References m_timestep.
{ return m_timestep; }

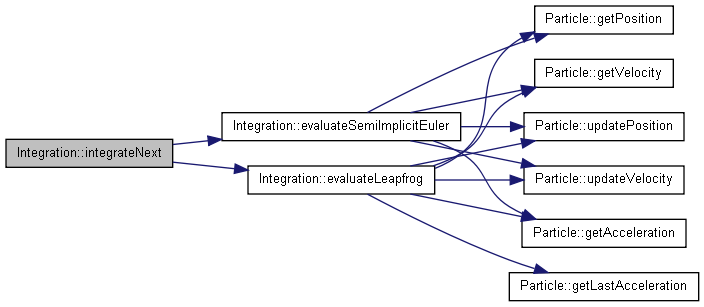
| void Integration::integrateNext | ( | Particle & | io_currentParticle | ) |
integrate next velocity and position of a particle
| [in,out] | io_currentParticle | the particle that is being affected |
Definition at line 16 of file Integration.cpp.
References evaluateLeapfrog(), evaluateSemiImplicitEuler(), LEAPFROG, m_integrationType, and SEMI_IMPLICIT_EULER.
{
//calls user-chosen integrator
switch (m_integrationType)
{
case SEMI_IMPLICIT_EULER: { evaluateSemiImplicitEuler(io_currentParticle); break; }
case LEAPFROG: { evaluateLeapfrog(io_currentParticle); break; }
default : break;
}
}

| void Integration::setIntegrationType | ( | const int | _v | ) | [inline] |
set the integration method of the simulation
| [in] | _v | new integration method |
Definition at line 48 of file Integration.h.
References m_integrationType.
{ m_integrationType = (IntegrationType)_v; }
| void Integration::setIntegrationType | ( | const IntegrationType | _v | ) | [inline] |
sets the integration method
| [in] | _v | the new integration method |
Definition at line 44 of file Integration.h.
References m_integrationType.
{ m_integrationType = _v; }

| void Integration::setTimestep | ( | const ngl::Real | _v | ) | [inline] |
set the timestep of the simulation
| [in] | _v | new timestep |
Definition at line 55 of file Integration.h.
References m_timestep.
{ m_timestep = _v; }

integration method
Definition at line 60 of file Integration.h.
ngl::Real Integration::m_timestep [private] |
timestep of simulation
Definition at line 63 of file Integration.h.
 1.7.4
1.7.4 
